Wang Xincheng, Lin Musong, Sang Lingfeng, Wang Hongbo, Feng Yongfei, Niu Jianye, Yu Hongfei, Cheng Bo
Hebei Provincial Key Laboratory of Parallel Robot and Mechatronic System, Yanshan University, Qinhuangdao 066000, China.
School of Mechanical Engineering, Yanshan University, Qinhuangdao 066000, China.
Sensors (Basel). 2024 Nov 25;24(23):7506. doi: 10.3390/s24237506.
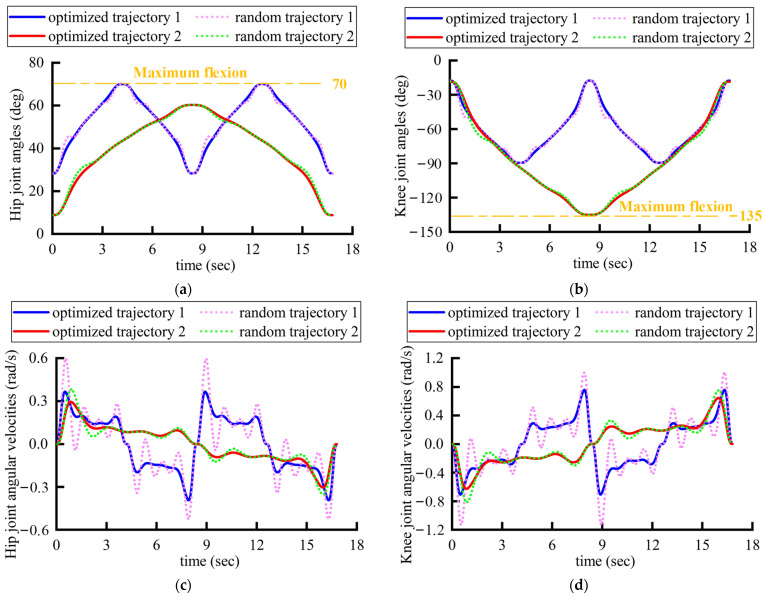
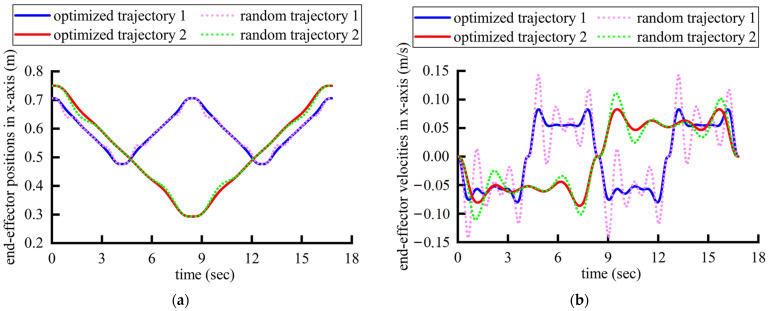
In rehabilitation, physicians plan lower-limb exercises via linear guidance. Ensuring efficacy and safety, they design patient-specific paths, carefully plotting smooth trajectories to minimize jerks. Replicating their precision in robotics is a major challenge. This study introduces a linear rehabilitation motion planning method designed for physicians to use a multi-posture lower-limb rehabilitation robot, encompassing both path and trajectory planning. By subdividing the lower limb's action space into four distinct training sections and classifying this space, we articulate the correlation between linear trajectories and key joint rehabilitation metrics. Building upon this foundation, a rehabilitative path generation system is developed, anchored in joint rehabilitation indicators. Subsequently, high-order polynomial curves are employed to mimic the smooth continuity of traditional rehabilitation trajectories and joint motions. Furthermore, trajectory planning is refined through the resolution of a constrained quadratic optimization problem, aiming to minimize the abrupt jerks in the trajectory. The optimized trajectories derived from our experiments are compared with randomly generated trajectories, demonstrating the suitability of trajectory optimization for real-time rehabilitation trajectory planning. Additionally, we compare trajectories generated based on the two groups of joint rehabilitation indicators, indicating that the proposed path generation system effectively assists clinicians in executing efficient and precise robot-assisted rehabilitation path planning.
在康复治疗中,医生通过线性引导来规划下肢运动。为确保疗效和安全性,他们设计针对患者的运动路径,精心绘制平滑轨迹以尽量减少抖动。在机器人技术中复制这种精度是一项重大挑战。本研究介绍了一种线性康复运动规划方法,旨在让医生能够使用多姿态下肢康复机器人,该方法涵盖路径规划和轨迹规划。通过将下肢的动作空间细分为四个不同的训练部分并对该空间进行分类,我们明确了线性轨迹与关键关节康复指标之间的关联。在此基础上,开发了一个基于关节康复指标的康复路径生成系统。随后,采用高阶多项式曲线来模拟传统康复轨迹和关节运动的平滑连续性。此外,通过解决一个约束二次优化问题来优化轨迹规划,旨在尽量减少轨迹中的突然抖动。将我们实验得出的优化轨迹与随机生成的轨迹进行比较,证明了轨迹优化适用于实时康复轨迹规划。此外,我们比较了基于两组关节康复指标生成的轨迹,表明所提出的路径生成系统有效地协助临床医生执行高效且精确的机器人辅助康复路径规划。