Chen Zhijian, Fang Yijun, Yin Jianjun, Lv Shiyu, Sheikh Muhammad Farhan, Liu Lu
School of Agricultural Engineering, Jiangsu University, Zhenjiang, China.
Institute of Technology, Anhui Agricultural University, Hefei, China.
Front Plant Sci. 2024 Dec 24;15:1509746. doi: 10.3389/fpls.2024.1509746. eCollection 2024.
The rapid urbanization of rural regions, along with an aging population, has resulted in a substantial manpower scarcity for agricultural output, necessitating the urgent development of highly intelligent and accurate agricultural equipment technologies.
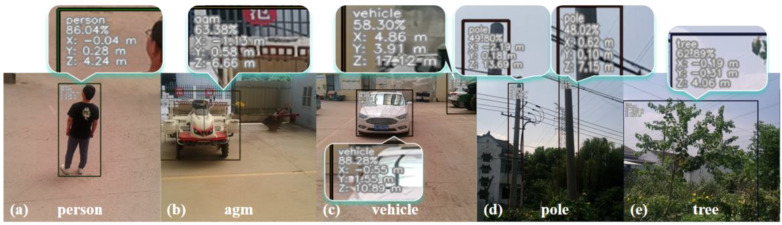
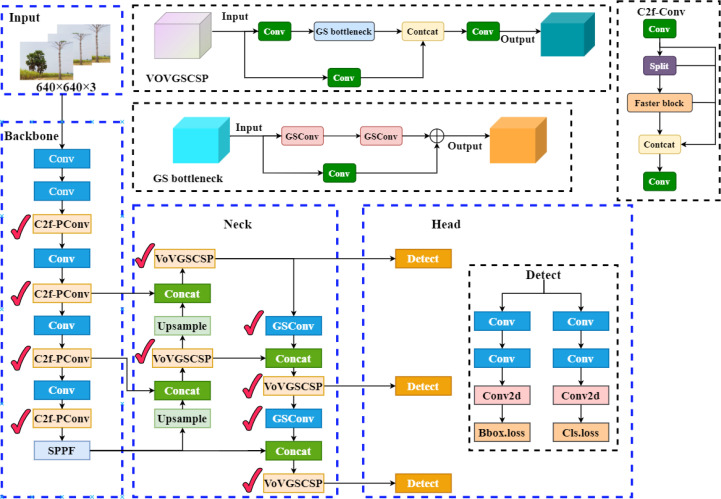
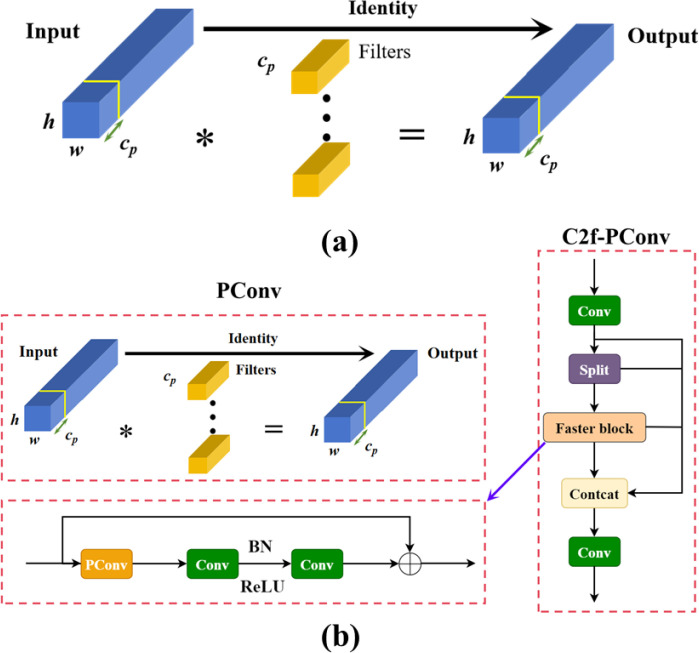
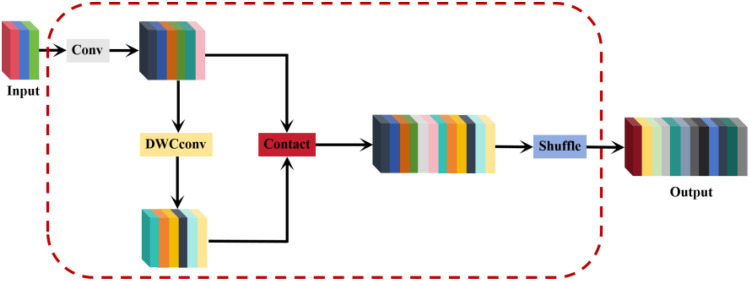
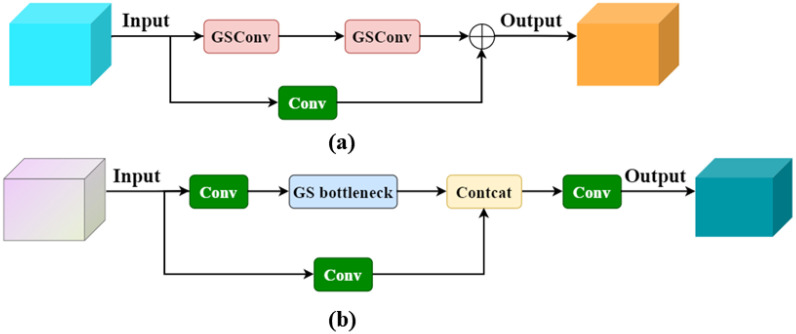
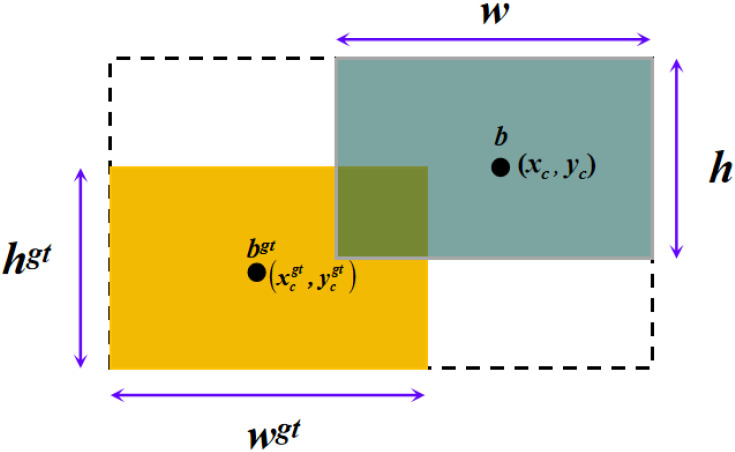
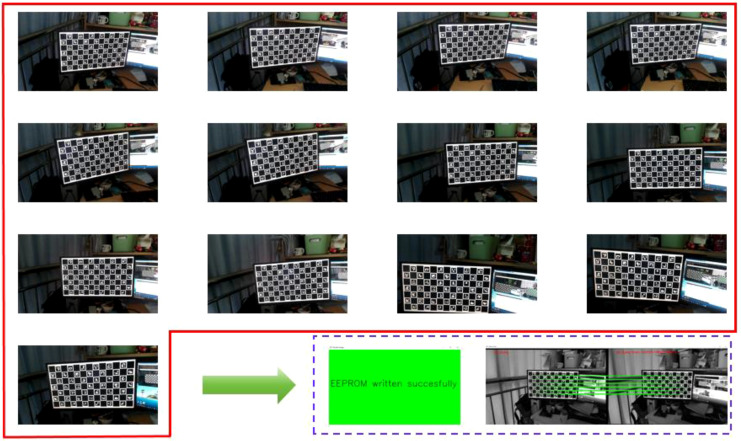
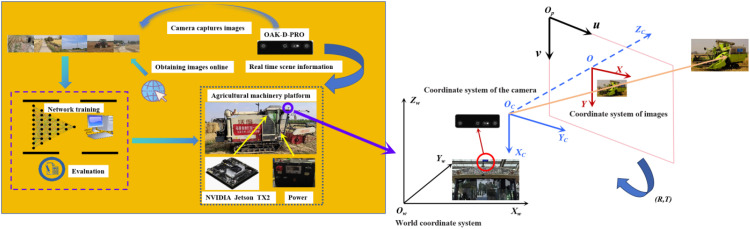
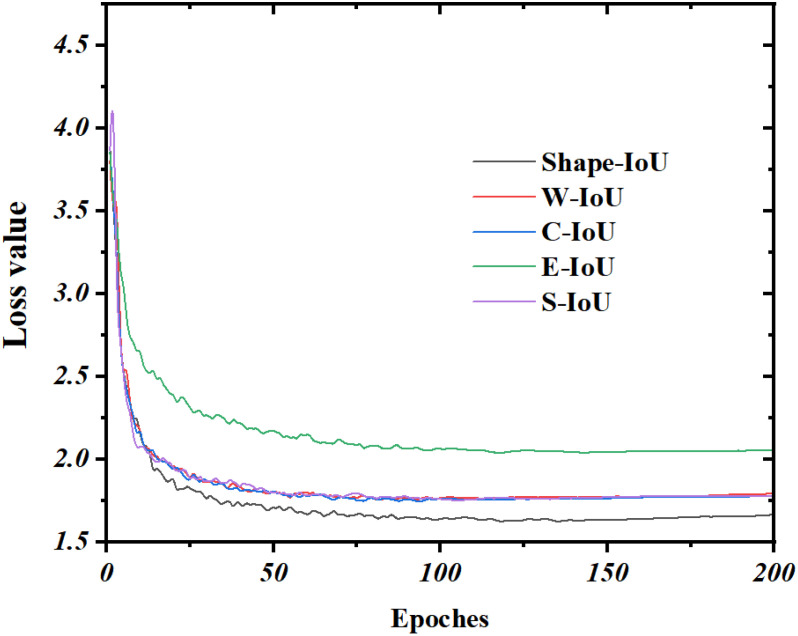
This research introduces YOLOv8-PSS, an enhanced lightweight obstacle detection model, to increase the effectiveness and safety of unmanned agricultural robots in intricate field situations. This YOLOv8-based model incorporates a depth camera to precisely identify and locate impediments in the way of autonomous agricultural equipment. Firstly, this work integrates partial convolution (PConv) into the C2f module of the backbone network to improve inference performance and minimize computing load. PConv significantly reduces processing load during convolution operations, enhancing the model's real-time detection performance. Second, a Slim-neck lightweight neck network is introduced, replacing the original neck network's conventional convolution with GSConv, to further improve detection efficiency and accuracy. This adjustment preserves accuracy while reducing the complexity of the model. After optimization, the bounding box loss function is finally upgraded to Shape-IoU (Shape Intersection over Union), which improves both model accuracy and generalization.
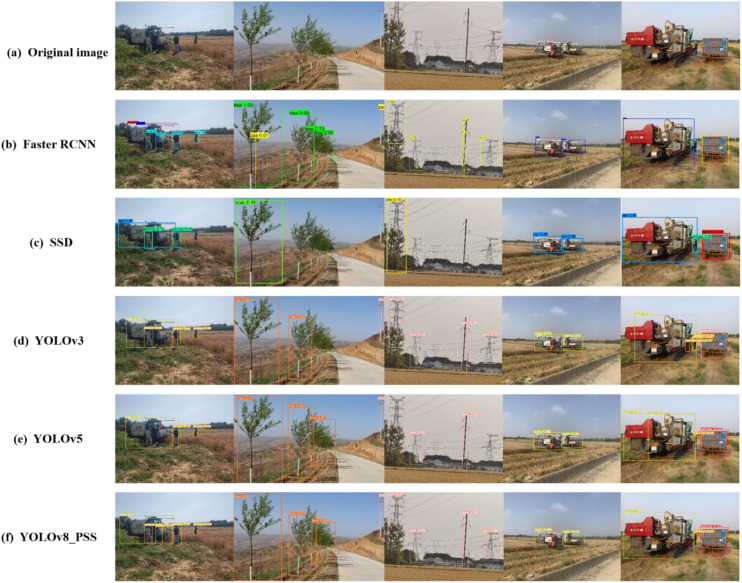
The experimental results demonstrate that the improved YOLOv8_PSS model achieves a precision of 85.3%, a recall of 88.4%, and an average accuracy of 90.6%. Compared to the original base network, it reduces the number of parameters by 55.8%, decreases the model size by 59.5%, and lowers computational cost by 51.2%. When compared with other algorithms, such as Faster RCNN, SSD, YOLOv3-tiny, and YOLOv5, the improved model strikes an optimal balance between parameter count, computational efficiency, detection speed, and accuracy, yielding superior results. In positioning accuracy tests, the, average and maximum errors in the measured distances between the camera and typical obstacles (within a range of 2-15 meters) were 2.73% and 4.44%, respectively.
The model performed effectively under real-world conditions, providing robust technical support for future research on autonomous obstacle avoidance in unmanned agricultural machinery.
农村地区的快速城市化以及人口老龄化,导致农业产出面临严重的人力短缺,因此迫切需要发展高度智能且精确的农业装备技术。
本研究引入了YOLOv8-PSS,一种增强的轻量级障碍物检测模型,以提高无人农业机器人在复杂田间环境中的有效性和安全性。这个基于YOLOv8的模型结合了深度相机,以精确识别和定位自主农业装备路径上的障碍物。首先,这项工作将部分卷积(PConv)集成到主干网络的C2f模块中,以提高推理性能并最小化计算负载。PConv在卷积操作期间显著降低了处理负载,增强了模型的实时检测性能。其次,引入了一个Slim-neck轻量级颈部网络,用GSConv取代了原始颈部网络的传统卷积,以进一步提高检测效率和准确性。这种调整在保持准确性的同时降低了模型的复杂性。经过优化,边界框损失函数最终升级为Shape-IoU(形状交并比),这提高了模型的准确性和泛化能力。
实验结果表明,改进后的YOLOv8_PSS模型的精度达到85.3%,召回率为88.4%,平均准确率为90.6%。与原始基础网络相比,它的参数数量减少了55.8%,模型大小减小了59.5%,计算成本降低了51.2%。与其他算法(如Faster RCNN、SSD、YOLOv3-tiny和YOLOv5)相比,改进后的模型在参数数量、计算效率、检测速度和准确性之间达到了最佳平衡,产生了更优的结果。在定位精度测试中,相机与典型障碍物之间测量距离(在2至15米范围内)的平均误差和最大误差分别为2.73%和4.44%。
该模型在实际条件下表现有效,为未来无人农业机械自主避障研究提供了有力的技术支持。