Alsehaimi Basma, Alzamzami Ohoud, Alowidi Nahed, Ali Manar
Department of Computer Science, King AbdulAziz University, Jeddah 21589, Saudi Arabia.
Applied College, Taibah University, Madinah 41477, Saudi Arabia.
Sensors (Basel). 2025 Jan 6;25(1):282. doi: 10.3390/s25010282.
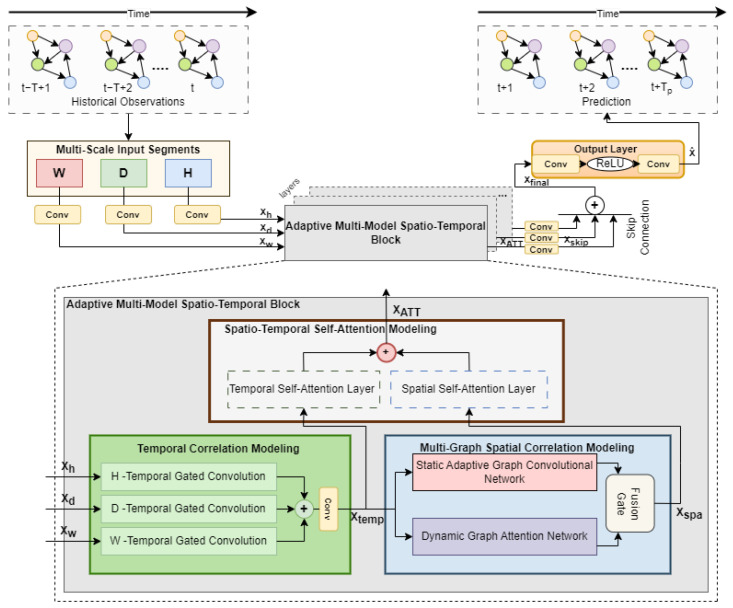
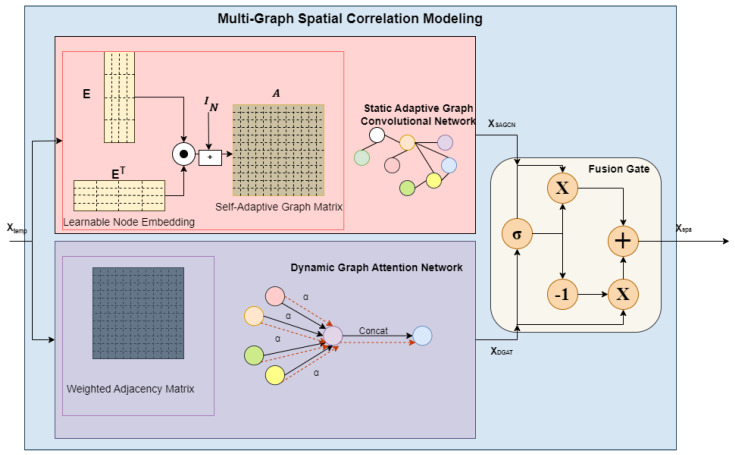
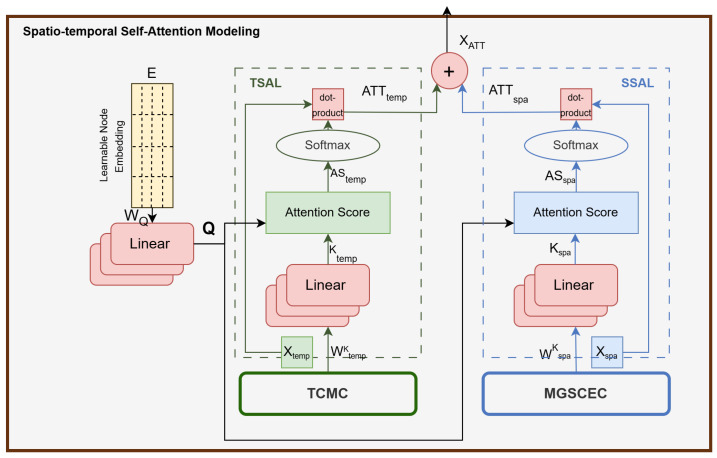
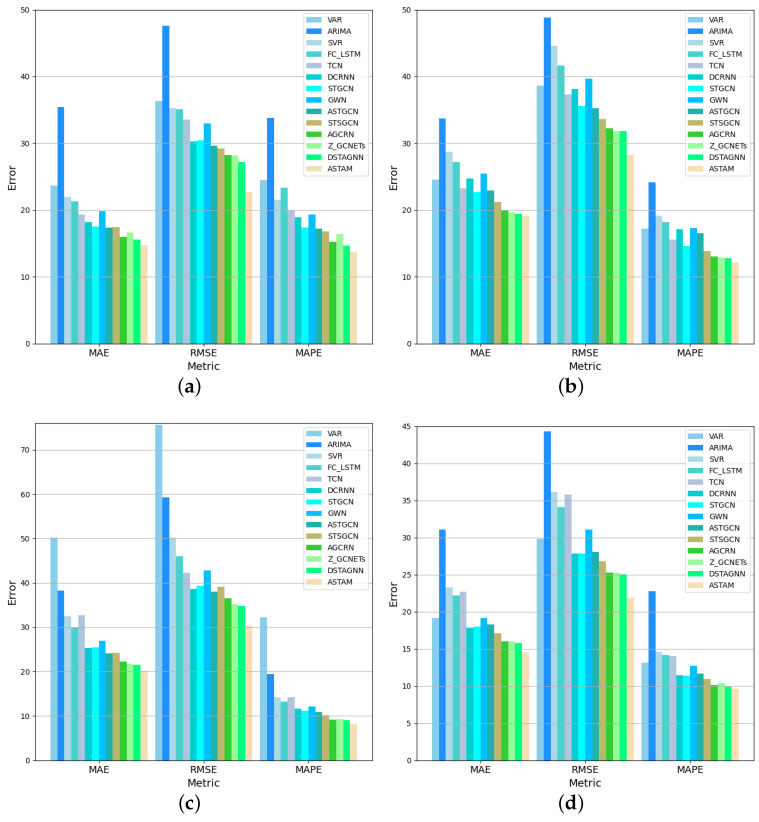
Traffic flow prediction is a pivotal element in Intelligent Transportation Systems (ITSs) that provides significant opportunities for real-world applications. Capturing complex and dynamic spatio-temporal patterns within traffic data remains a significant challenge for traffic flow prediction. Different approaches to effectively modeling complex spatio-temporal correlations within traffic data have been proposed. These approaches often rely on a single model to capture temporal dependencies, which neglects the varying influences of different time periods on traffic flow. Additionally, these models frequently utilize either static or dynamic graphs to represent spatial dependencies, which limits their ability to address complex and overlapping spatial relationships. Moreover, some approaches struggle to fully capture spatio-temporal variations, leading to the exclusion of critical information and ultimately resulting in suboptimal prediction performance. Thus, this paper introduces the Adaptive Spatio-Temporal Attention-Based Multi-Model (ASTAM), an architecture designed to capture spatio-temporal dependencies within traffic data. The ASTAM employs multi-temporal gated convolution with multi-scale temporal input segments to model complex non-linear temporal correlations. It utilizes static and dynamic parallel multi-graphs to facilitate the modeling of complex spatial dependencies. Furthermore, this model incorporates a spatio-temporal self-attention mechanism to adaptively capture the dynamic and long-term spatio-temporal variations in traffic flow. Experiments conducted on four real-world datasets reveal that the proposed architecture outperformed 13 baseline approaches, achieving average reductions of 5.0% in MAE, 13.28% in RMSE, and 6.46% in MAPE across four datasets.
交通流预测是智能交通系统(ITS)中的关键要素,为实际应用提供了重要机遇。捕捉交通数据中复杂且动态的时空模式对于交通流预测而言仍是一项重大挑战。人们已经提出了不同的方法来有效建模交通数据中的复杂时空相关性。这些方法通常依赖单一模型来捕捉时间依赖性,却忽略了不同时间段对交通流的不同影响。此外,这些模型常常使用静态或动态图来表示空间依赖性,这限制了它们处理复杂且重叠的空间关系的能力。而且,一些方法难以充分捕捉时空变化,导致关键信息被排除,最终致使预测性能欠佳。因此,本文介绍了基于自适应时空注意力的多模型(ASTAM),这是一种旨在捕捉交通数据中时空依赖性的架构。ASTAM采用多时间门控卷积和多尺度时间输入段来建模复杂的非线性时间相关性。它利用静态和动态并行多图来促进对复杂空间依赖性的建模。此外,该模型纳入了时空自注意力机制,以自适应地捕捉交通流中的动态和长期时空变化。在四个真实世界数据集上进行的实验表明,所提出的架构优于13种基线方法,在四个数据集上的平均绝对误差(MAE)降低了5.0%,均方根误差(RMSE)降低了13.28%,平均绝对百分比误差(MAPE)降低了6.46%。