Yeung Trevor M, Bauer Philip, Behman Ramy, Marcadis Andrea, Studniarek Adam, Nash Garrett, Garcia-Aguilar Julio
Department of Colorectal Surgery, Memorial Sloan Kettering Cancer Center, 1275 York Avenue, New York, NY, 10065, USA.
Division of Colorectal Surgery, Department of Surgery, The Chinese University of Hong Kong, Prince of Wales Hospital, Sha Tin, NT, Hong Kong.
J Robot Surg. 2025 Mar 27;19(1):129. doi: 10.1007/s11701-025-02287-4.
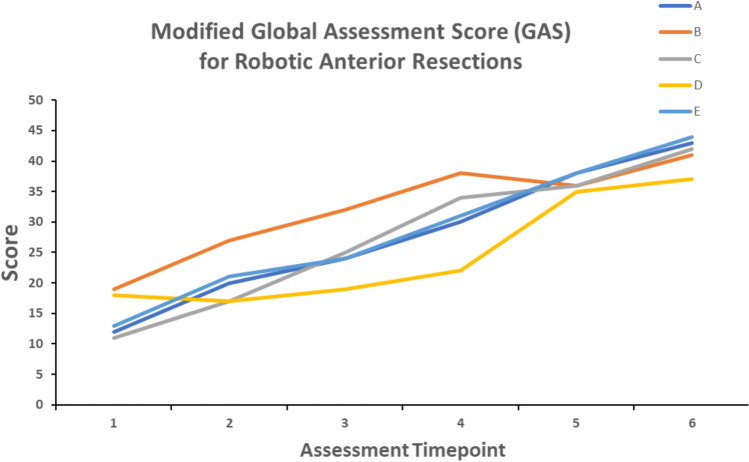
Robotic colorectal surgery is increasingly adopted worldwide, with mentored programs for established surgeons becoming more common. However, there is a paucity of dedicated robotic training programs for colorectal fellows. This study aims to assess the feasibility and efficacy of a structured, apprentice-based robotic colorectal training program delivered to multiple fellows concurrently. The fellowship program incorporates simulation training, dry/wet laboratory work, dedicated robotic console time in the operating room (OR) and individualised mentorship. Overall robotic proficiency was assessed using the Global Evaluative Assessment of Robotic Skills (GEARS) and procedure-specific proficiency was assessed using a modified European Academy of Robotic Colorectal Surgery (EARCS) Global Assessment Score (GAS) throughout the fellowship. A total of 59 cases (29 right hemicolectomies, 30 anterior resections) were evaluated between August 2023 and July 2024. Significant improvements were observed in GEARS scores (p = 0.0065) and modified GAS for both right hemicolectomies (p = 0.0052) and anterior resections (p = 0.0005), demonstrating a high level of competence and independence. Mean operative times were 213 min (right hemicolectomy) and 328 min (anterior resection). Median length of stay in the hospital was 2 days (right hemicolectomy) and 4 days (anterior resection). Median lymph node yield was 29 (right hemicolectomy) and 26 (anterior resection). There was 0% involved margins for both procedures. Robotic colorectal surgical oncology training delivered to multiple fellows concurrently in an apprenticeship model with dedicated console time is achievable and successful, leading to high levels of robotic competency and independence, whilst maintaining a high standard of clinical care and oncological outcome.
机器人结直肠手术在全球范围内的应用日益广泛,针对经验丰富的外科医生的指导项目也越来越普遍。然而,针对结直肠专科住院医师的专门机器人培训项目却很少。本研究旨在评估同时为多名专科住院医师提供的结构化、学徒制机器人结直肠培训项目的可行性和有效性。该专科住院医师培训项目包括模拟训练、干式/湿式实验室操作、在手术室(OR)的专用机器人控制台时间以及个性化指导。在整个培训期间,使用机器人技能全球评估(GEARS)评估总体机器人操作熟练程度,并使用改良的欧洲机器人结直肠外科学会(EARCS)全球评估评分(GAS)评估特定手术的熟练程度。在2023年8月至2024年7月期间共评估了59例病例(29例右半结肠切除术,30例前切除术)。观察到GEARS评分(p = 0.0065)以及右半结肠切除术(p = 0.0052)和前切除术(p = 0.0005)的改良GAS均有显著改善,表明具备高水平的能力和独立性。平均手术时间分别为213分钟(右半结肠切除术)和328分钟(前切除术)。住院时间中位数分别为2天(右半结肠切除术)和4天(前切除术)。淋巴结切除中位数分别为29个(右半结肠切除术)和26个(前切除术)。两种手术的切缘受累率均为0%。以学徒模式同时为多名专科住院医师提供机器人结直肠肿瘤手术培训,并给予专用控制台时间是可行且成功的,可带来高水平的机器人操作能力和独立性,同时保持高标准的临床护理和肿瘤学结局。