Sharma Abhinav K, de Oliveira Rafael Garcia, Suvithayasiri Siravich, Chavalparit Piya, Chang Chien Chun, Kim Yong H, Fischer Charla R, Lee Sang, Cho Samuel, Kim Jin-Sung, Park Don Young
Department of Orthopaedic Surgery, UC Irvine, Orange, CA, USA.
Virginia Mason Medical Center, Seattle, WA, USA.
Neurospine. 2025 Mar;22(1):105-117. doi: 10.14245/ns.2449404.702. Epub 2025 Mar 31.
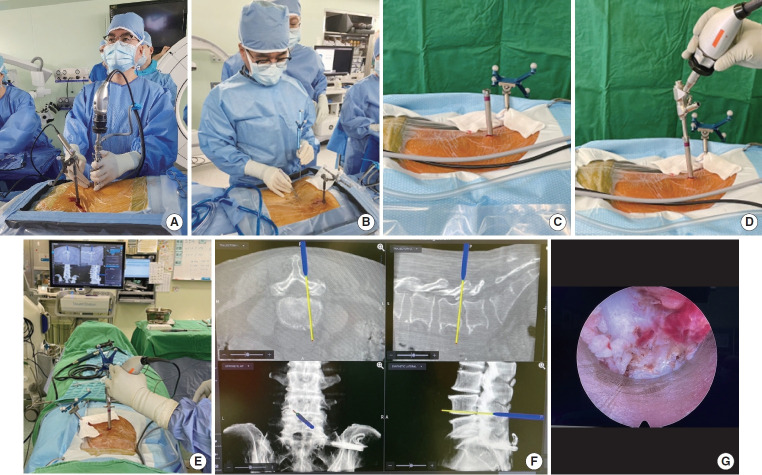
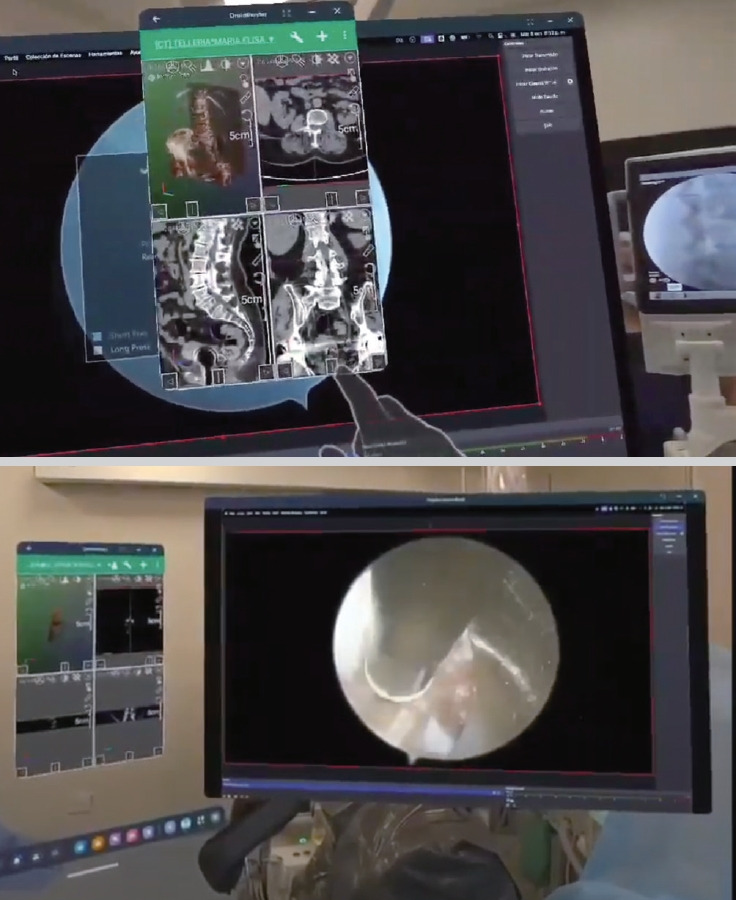
Endoscopic spine surgery (ESS) is growing in popularity worldwide. An expanding body of literature demonstrates rapid functional recovery with reduced morbidity compared to open techniques. Both full endoscopic spine surgery, or uniportal endoscopy, and unilateral biportal endoscopy (UBE) can be employed in conjunction with various navigation and enabling technologies for assistance with localization of anatomic orientation and assessment of the intraoperative target spinal pathology. This review article describes various navigation technologies in ESS, including 2-dimensional (2D) fluoroscopic imaging, 2D fluoroscopic navigation, 3-dimensional C-arm navigation, augmented reality, and spinal robotics. Employment of enabling navigation and emerging technology with the registration of patient-specific anatomy enables clear delineation of anatomic landmarks and facilitation of a successful procedure. Additionally, avoidance of common pitfalls during use of navigation systems in ESS is discussed in this review.
内镜脊柱手术(ESS)在全球范围内越来越受欢迎。越来越多的文献表明,与开放手术技术相比,ESS能实现快速功能恢复且发病率降低。全内镜脊柱手术(即单通道内镜)和单侧双通道内镜(UBE)均可与各种导航及辅助技术联合使用,以协助定位解剖方向和评估术中目标脊柱病变。这篇综述文章描述了ESS中的各种导航技术,包括二维(2D)荧光透视成像、2D荧光透视导航、三维C型臂导航、增强现实和脊柱机器人技术。运用辅助导航和新兴技术并结合患者特定解剖结构的配准,能够清晰勾勒解剖标志并促进手术成功进行。此外,本文还讨论了在ESS中使用导航系统时应避免的常见陷阱。