Wu Zehao, Wang Xianli, Cao Yuning, Zhang Weijian, Xu Qingsong
Department of Electromechanical Engineering, Faculty of Science and Technology, University of Macau, Taipa, Macau, China.
Cyborg Bionic Syst. 2025 May 2;6:0251. doi: 10.34133/cbsystems.0251. eCollection 2025.
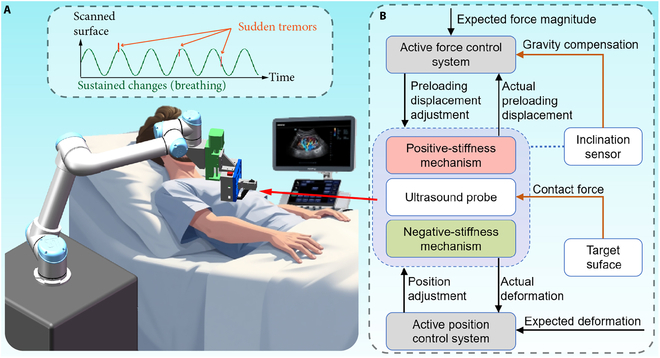
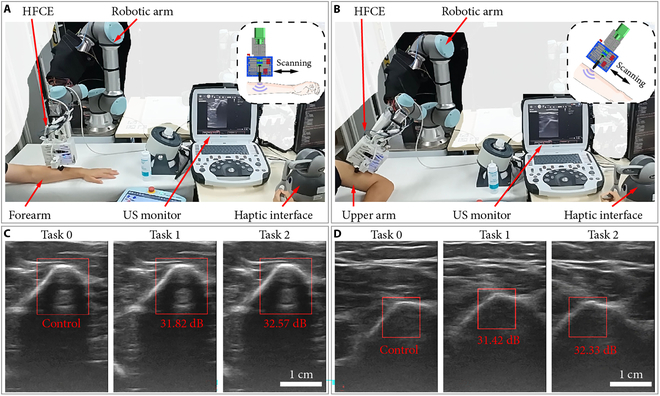
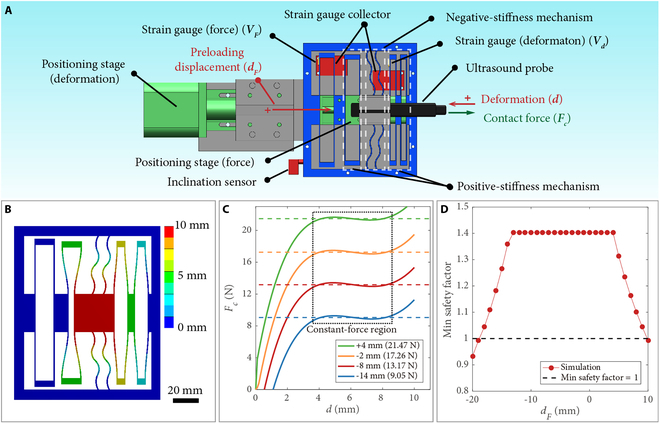
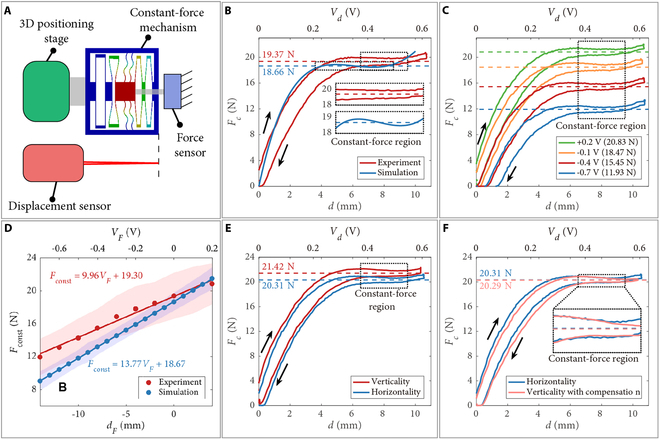
In modern medical treatment, ultrasound scanning provides a radiation-free medical imaging method for the diagnosis of soft tissues via skin contact. However, the exerted contact force heavily relies on the skill and experience of the operator, which poses great inspection instability. This article reports on a robotic ultrasound scanning system with a constant-force end-effector. Its uniqueness is the introduction of a hybrid active-passive force control approach to maintaining a constant contact force between the ultrasound probe and the continually changing surface. In particular, the passive constant-force mechanism provides strong buffering to the force variation. The active force control system improves flexibility and provides long-stroke positioning. Experimental tests on both silicone models and human volunteers demonstrate the capability of the proposed robotic ultrasound scanning system for obtaining qualified ultrasound images with high repeatability. Moreover, the ease of operation of the robotic US scanning system is verified. This work provides a promising method to assist doctors in conducting better and cushier ultrasound scanning imaging.
在现代医学治疗中,超声扫描通过皮肤接触为软组织诊断提供了一种无辐射的医学成像方法。然而,施加的接触力在很大程度上依赖于操作者的技能和经验,这导致了极大的检查不稳定性。本文报道了一种具有恒力末端执行器的机器人超声扫描系统。其独特之处在于引入了一种混合主动-被动力控制方法,以保持超声探头与不断变化的表面之间的恒定接触力。特别是,被动恒力机构为力的变化提供了强大的缓冲。主动力控制系统提高了灵活性并提供了长行程定位。在硅胶模型和人类志愿者上进行的实验测试证明了所提出的机器人超声扫描系统能够以高重复性获得合格的超声图像。此外,还验证了机器人超声扫描系统的操作简便性。这项工作为协助医生进行更好、更轻松的超声扫描成像提供了一种有前景的方法。