Karashchuk Lili, Li Jing Shuang, Chou Grant M, Walling-Bell Sarah, Brunton Steven L, Tuthill John C, Brunton Bingni W
Neuroscience Graduate Program, University of Washington, Seattle, United States.
Department of Neurobiology and Biophysics, University of Washington, Seattle, United States.
Elife. 2025 May 15;13:RP99005. doi: 10.7554/eLife.99005.
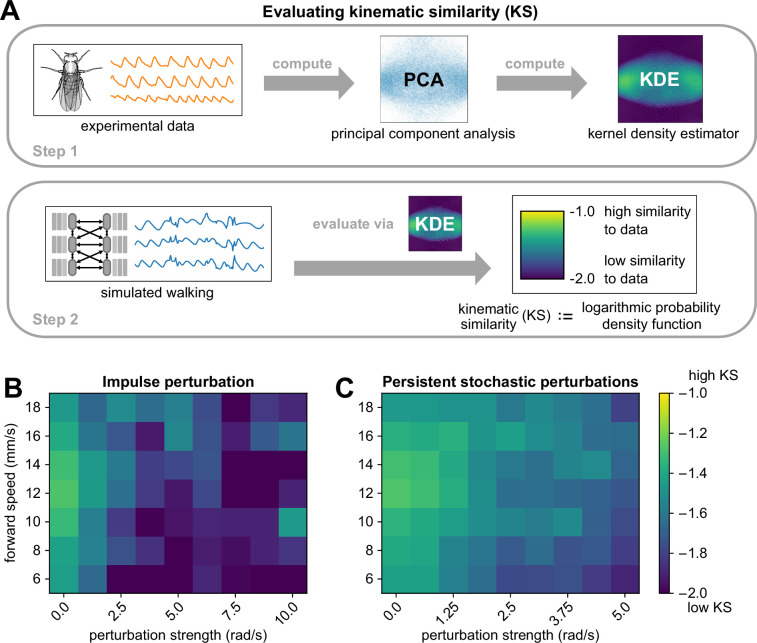
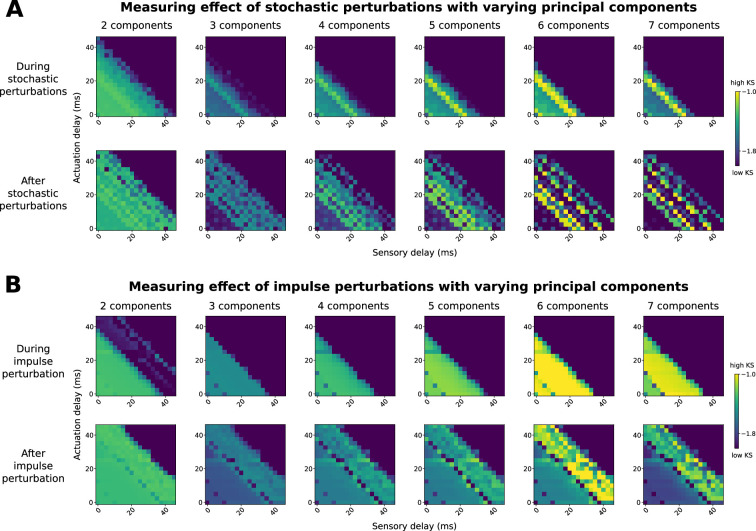
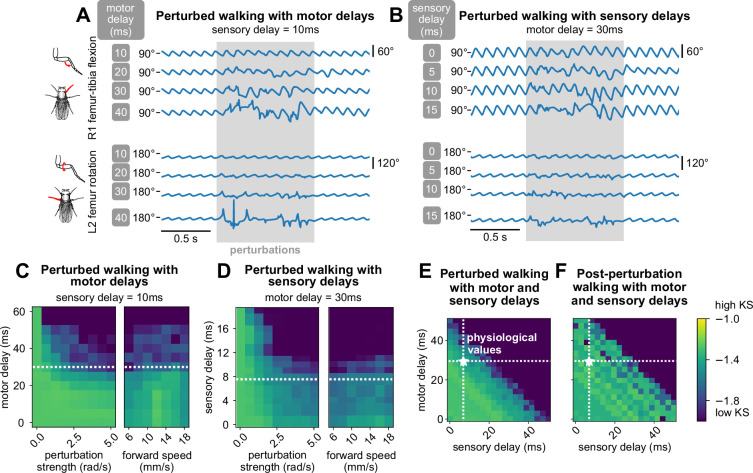
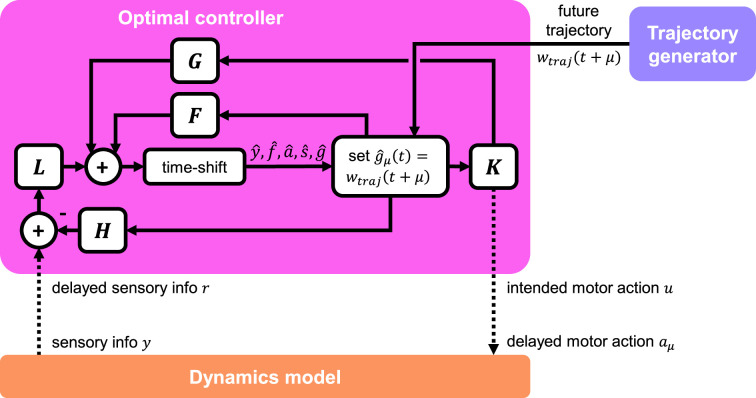
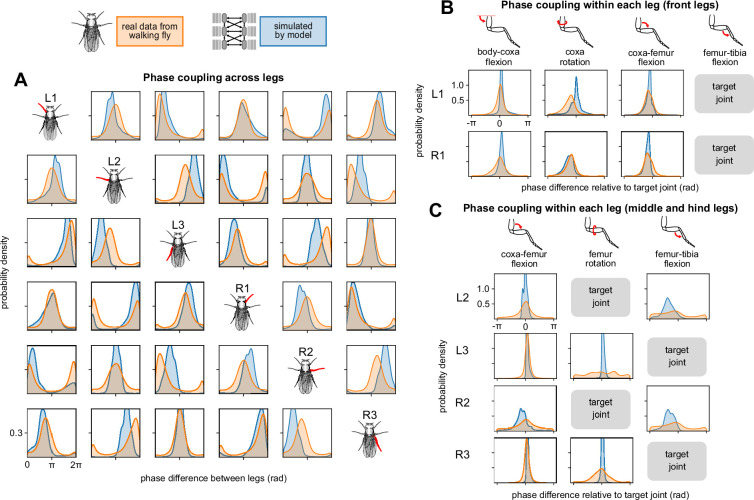
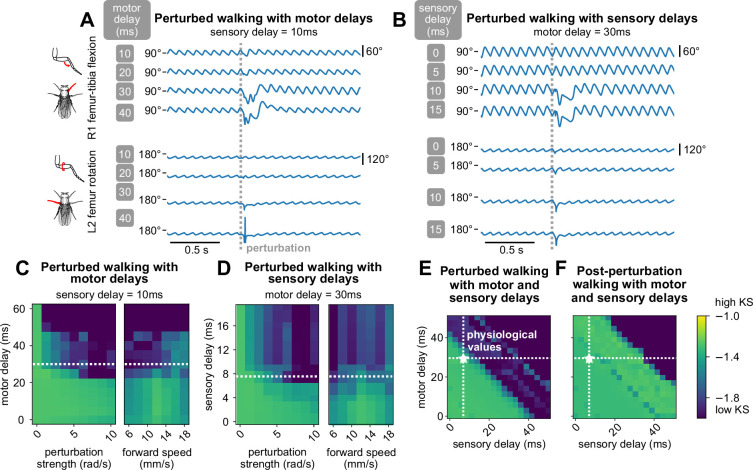
Walking animals must maintain stability in the presence of external perturbations, despite significant temporal delays in neural signaling and muscle actuation. Here, we develop a 3D kinematic model with a layered control architecture to investigate how sensorimotor delays constrain the robustness of walking behavior in the fruit fly, . Motivated by the anatomical architecture of insect locomotor control circuits, our model consists of three component layers: a neural network that generates realistic 3D joint kinematics for each leg, an optimal controller that executes the joint kinematics while accounting for delays, and an inter-leg coordinator. The model generates realistic simulated walking that resembles real fly walking kinematics and sustains walking even when subjected to unexpected perturbations, generalizing beyond its training data. However, we found that the model's robustness to perturbations deteriorates when sensorimotor delay parameters exceed the physiological range. These results suggest that fly sensorimotor control circuits operate close to the temporal limit at which they can detect and respond to external perturbations. More broadly, we show how a modular, layered model architecture can be used to investigate physiological constraints on animal behavior.
行走的动物必须在存在外部扰动的情况下保持稳定,尽管神经信号传导和肌肉驱动存在明显的时间延迟。在此,我们开发了一种具有分层控制架构的三维运动学模型,以研究感觉运动延迟如何限制果蝇行走行为的稳健性。受昆虫运动控制电路解剖结构的启发,我们的模型由三个组成层组成:一个为每条腿生成逼真的三维关节运动学的神经网络、一个在考虑延迟的情况下执行关节运动学的最优控制器,以及一个腿间协调器。该模型生成的逼真模拟行走类似于真实果蝇的行走运动学,即使受到意外扰动也能维持行走,并且超出了其训练数据的范围进行泛化。然而,我们发现当感觉运动延迟参数超过生理范围时,模型对扰动的稳健性会下降。这些结果表明,果蝇感觉运动控制电路在接近它们能够检测和响应外部扰动的时间极限下运行。更广泛地说,我们展示了如何使用模块化、分层的模型架构来研究对动物行为的生理限制。