Sun Yuyang, Chen Tao, Li Dongsheng, Li Hanyang, Ji Tianci, Wang Fengxia, Sun Lining, Lee Chengkuo, Liu Huicong
School of Mechanical and Electrical Engineering, Jiangsu Key Laboratory of Embodied Intelligence Robot Technology, Soochow University, Suzhou, 215006, China.
School of Future Science and Engineering, Soochow University, Suzhou, 215200, China.
Adv Mater. 2025 Aug;37(33):e2502203. doi: 10.1002/adma.202502203. Epub 2025 Jun 5.
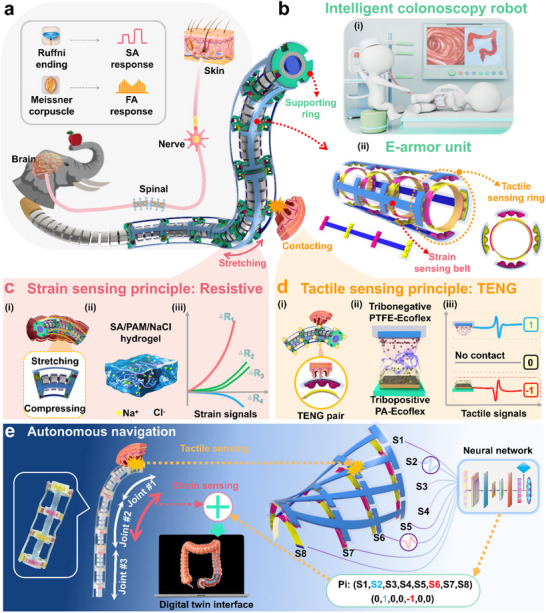
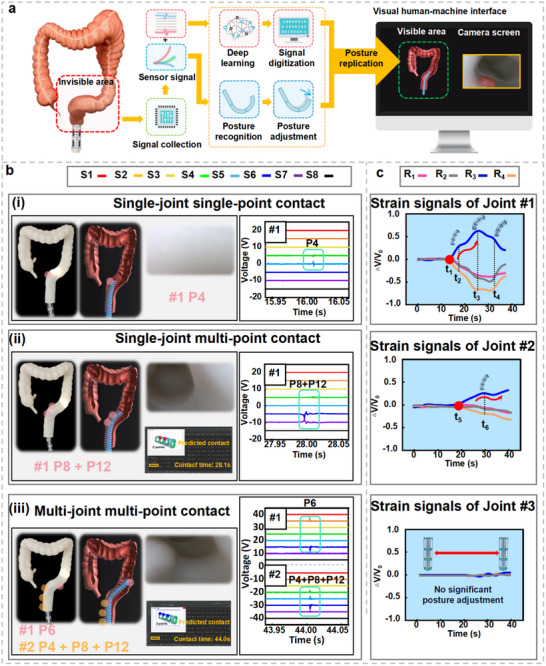
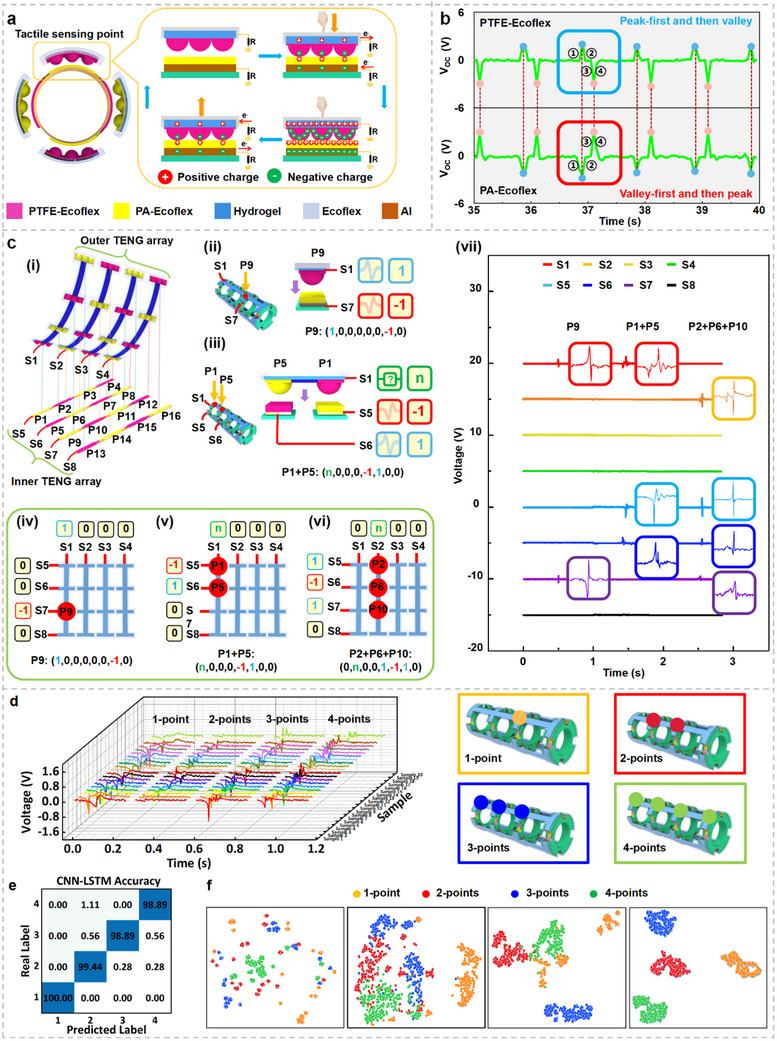
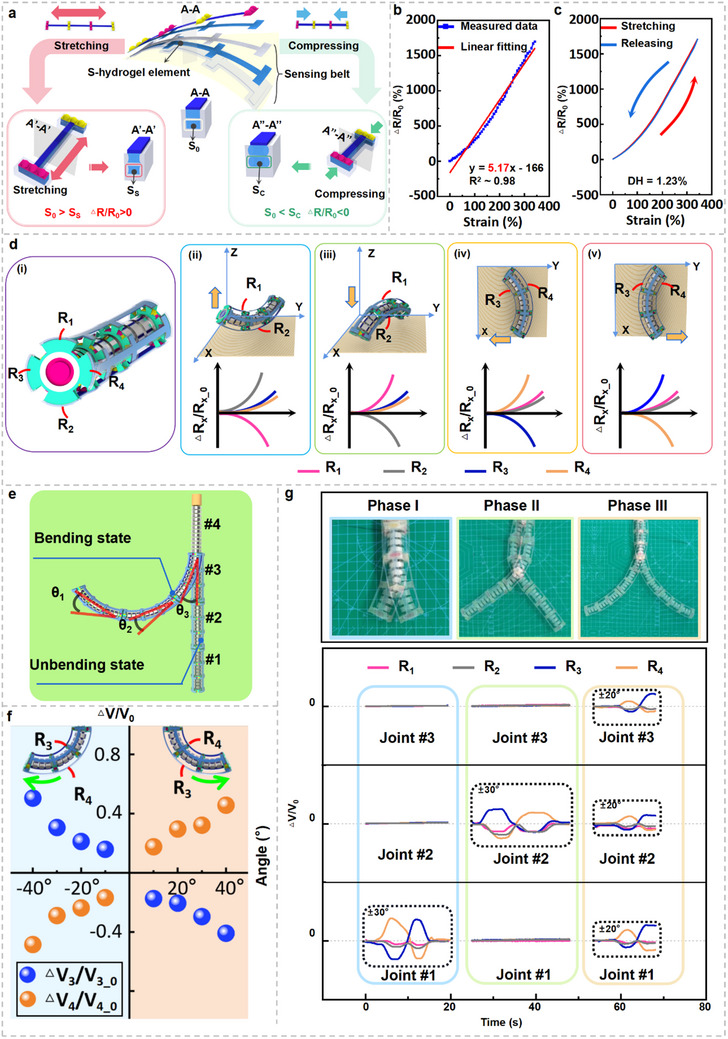
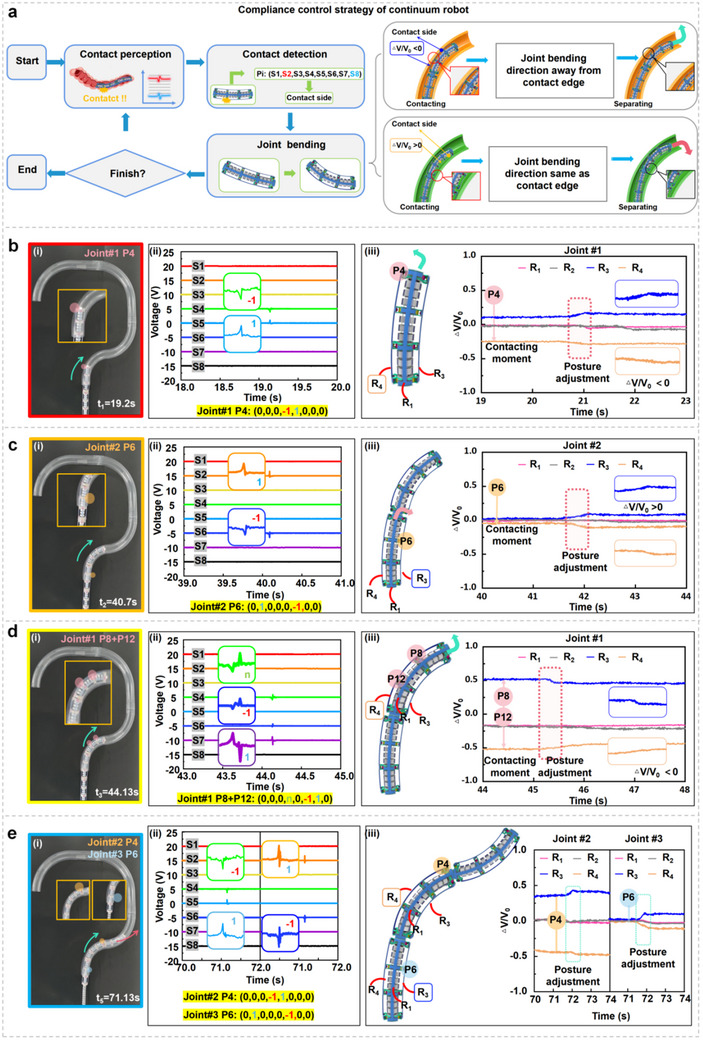
Colonoscopic continuum robots often lack sensing capabilities, risking tissue damage. An ideal robot electronic skin should offer full-body coverage, multiplexing, stretchability, and multifunctionality, but integration is challenging due to the robot's elongated structure. This work presents a stretchable electronic armor (E-armor) with a 3D crosslinked structure that enables 300 mm full coverage while accomplishing multiplexed simultaneous tactile and strain sensing through bioinspired artificial synapse mechanisms. The E-armor integrates 48 tactile sensing points through bilayer co-electrode strategy, reducing wiring while combining triboelectric encoding intelligence with innovative stretchable triboelectric interlinked films (TIFs) to form a triboelectric artificial synapse that generates digitally encoded signal pairs upon contact. A convolutional neural network and long short-term memory network (CNN-LSTM) deep learning framework achieve 99.31% accuracy in identifying multi-point tactile signals. A sodium alginate/polyacrylamide/sodium chloride (SA/PAM/NaCl) conductive hydrogel serves as a strain sensing element, providing excellent stretchability and biocompatibility, and allowing precise inference of bending angles at 12 strain sensing edges. A compliance control strategy coordinates tactile and strain signals to autonomously adjust continuum robot postures while ensuring smooth operation. The digital twin-based 3D visualization interface enhances human-robot interaction by digitally reconstructing both tactile and strain feedback, enabling real-time visualization of the continuum robot's intracolonic posture.
结肠镜连续体机器人通常缺乏传感能力,存在组织损伤风险。理想的机器人电子皮肤应具备全身覆盖、复用、可拉伸性和多功能性,但由于机器人的细长结构,集成具有挑战性。这项工作展示了一种具有三维交联结构的可拉伸电子装甲(E-装甲),它能够实现300毫米的全覆盖,同时通过仿生人工突触机制实现多路复用的同时触觉和应变传感。E-装甲通过双层共电极策略集成了48个触觉传感点,减少了布线,同时将摩擦电编码智能与创新的可拉伸摩擦电互连薄膜(TIF)相结合,形成一个摩擦电人工突触,在接触时生成数字编码信号对。一个卷积神经网络和长短期记忆网络(CNN-LSTM)深度学习框架在识别多点触觉信号方面达到了99.31%的准确率。海藻酸钠/聚丙烯酰胺/氯化钠(SA/PAM/NaCl)导电水凝胶用作应变传感元件,具有出色的可拉伸性和生物相容性,并能在12个应变传感边缘精确推断弯曲角度。一种柔顺控制策略协调触觉和应变信号,以自主调整连续体机器人的姿态,同时确保平稳运行。基于数字孪生的三维可视化界面通过对触觉和应变反馈进行数字重建,增强了人机交互,实现了连续体机器人结肠内姿态的实时可视化。