Del Bono Viola, McCandless Max, Gerald Arincheyan, Capaldi Emma, Pang Johann, Muter Casper, Baldiswieler Mark, Aihara Hiroyuki, Russo Sheila
Mechanical Engineering Department, Boston University, Boston, MA 02215 USA.
Biomedical Engineering Department, Boston University, Boston, MA 02215 USA.
Npj Robot. 2025;3(1):15. doi: 10.1038/s44182-025-00028-1. Epub 2025 Jun 13.
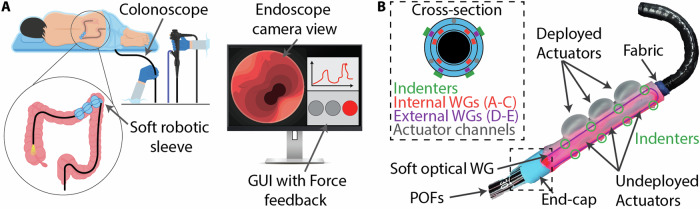
Colonoscopy is vital for diagnosing colorectal cancer, but limitations in instrument dexterity and sensor feedback can affect safety and patient comfort. We propose a disposable soft robotic "add-on" that attaches to existing endoscopic tools, enhancing safety without requiring custom instruments or workflow changes. The robot features soft optical sensors for 3D shape detection and force monitoring. If excessive force is detected, soft actuators redistribute pressure. A graphical interface provides real-time force data alongside the endoscope camera view. Validation experiments show accurate 3D shape reconstruction (8.51% curvature error, 9.67% orientation error) and force estimation up to 6 N with 3.38% accuracy. In-vitro tests confirm effective force redistribution, while ex-vivo tests on a bovine colon demonstrate smooth integration with minimal impact on the user learning curve. In-vivo swine studies validate safety and feasibility, confirming compatibility with existing tools and minimal disruption to clinical workflows, ensuring an efficient colonoscopy experience.
结肠镜检查对于诊断结直肠癌至关重要,但器械灵活性和传感器反馈方面的局限性会影响安全性和患者舒适度。我们提出了一种一次性使用的软性机器人“附加装置”,它可以附着在现有的内镜工具上,在无需定制器械或改变工作流程的情况下提高安全性。该机器人具有用于三维形状检测和力监测的软性光学传感器。如果检测到过大的力,软性致动器会重新分配压力。一个图形界面会在内窥镜摄像头视图旁边提供实时力数据。验证实验表明三维形状重建准确(曲率误差8.51%,方向误差9.67%),力估计在6牛以内,准确率为3.38%。体外测试证实了有效的力重新分配,而在牛结肠上进行的离体测试表明其能顺利集成,对用户学习曲线的影响最小。体内猪实验验证了安全性和可行性,确认了与现有工具的兼容性以及对临床工作流程的干扰最小,确保了高效的结肠镜检查体验。