van der Kooij Herman, Peterka Robert J
Department of Biomechanical Engineering, University of Twente, 7500 AE, Enschede, The Netherlands.
J Comput Neurosci. 2011 Jun;30(3):759-78. doi: 10.1007/s10827-010-0291-y. Epub 2010 Dec 15.
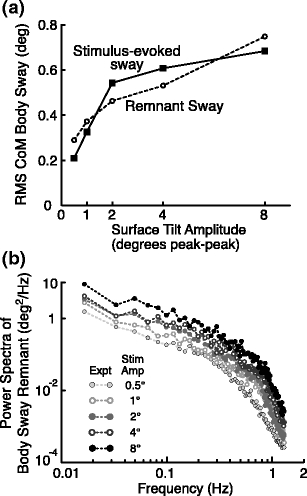
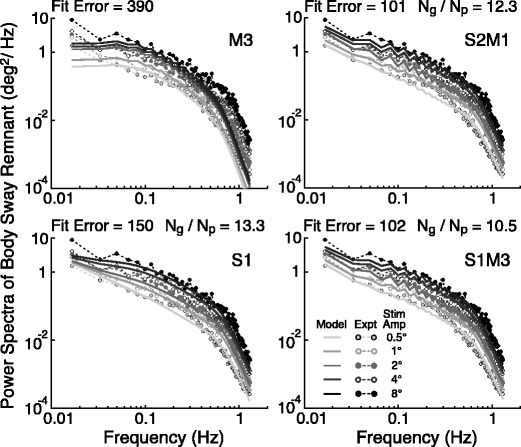
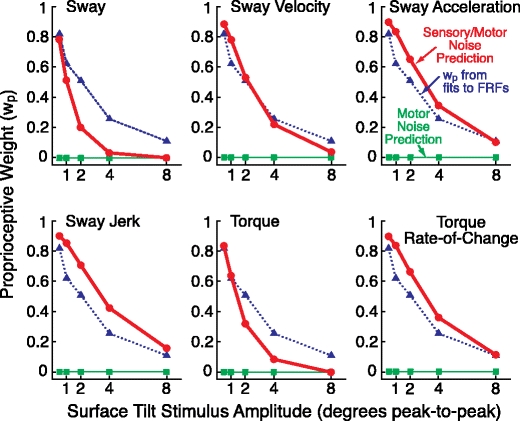
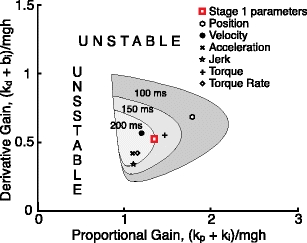
We developed a theory of human stance control that predicted (1) how subjects re-weight their utilization of proprioceptive and graviceptive orientation information in experiments where eyes closed stance was perturbed by surface-tilt stimuli with different amplitudes, (2) the experimentally observed increase in body sway variability (i.e. the "remnant" body sway that could not be attributed to the stimulus) with increasing surface-tilt amplitude, (3) neural controller feedback gains that determine the amount of corrective torque generated in relation to sensory cues signaling body orientation, and (4) the magnitude and structure of spontaneous body sway. Responses to surface-tilt perturbations with different amplitudes were interpreted using a feedback control model to determine control parameters and changes in these parameters with stimulus amplitude. Different combinations of internal sensory and/or motor noise sources were added to the model to identify the properties of noise sources that were able to account for the experimental remnant sway characteristics. Various behavioral criteria were investigated to determine if optimization of these criteria could predict the identified model parameters and amplitude-dependent parameter changes. Robust findings were that remnant sway characteristics were best predicted by models that included both sensory and motor noise, the graviceptive noise magnitude was about ten times larger than the proprioceptive noise, and noise sources with signal-dependent properties provided better explanations of remnant sway. Overall results indicate that humans dynamically weight sensory system contributions to stance control and tune their corrective responses to minimize the energetic effects of sensory noise and external stimuli.
我们提出了一种人体姿势控制理论,该理论预测:(1) 在闭眼姿势因不同幅度的表面倾斜刺激而受到干扰的实验中,受试者如何重新权衡其对本体感受和重力感受方向信息的利用;(2) 随着表面倾斜幅度增加,实验观察到的身体摇摆变异性增加(即无法归因于刺激的“残余”身体摇摆);(3) 神经控制器反馈增益,其决定了相对于指示身体方向的感觉线索产生的纠正扭矩量;(4) 自发身体摇摆的大小和结构。使用反馈控制模型解释对不同幅度表面倾斜扰动的反应,以确定控制参数以及这些参数随刺激幅度的变化。将内部感觉和/或运动噪声源的不同组合添加到模型中,以识别能够解释实验残余摇摆特征的噪声源属性。研究了各种行为标准,以确定这些标准的优化是否可以预测所识别的模型参数和幅度依赖性参数变化。可靠的发现是,包含感觉和运动噪声的模型能最好地预测残余摇摆特征,重力感受噪声幅度比本体感受噪声大约十倍,具有信号依赖属性的噪声源能更好地解释残余摇摆。总体结果表明,人类动态权衡感觉系统对姿势控制的贡献,并调整其纠正反应,以最小化感觉噪声和外部刺激的能量影响。