Department of Radiology, Radboud University Nijmegen Medical Centre, Nijmegen, Netherlands.
Eur Radiol. 2012 Feb;22(2):476-83. doi: 10.1007/s00330-011-2259-3. Epub 2011 Sep 29.
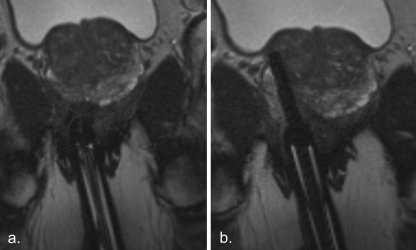
To evaluate the accuracy and speed of a novel robotic technique as an aid to perform magnetic resonance image (MRI)-guided prostate biopsies on patients with cancer suspicious regions.
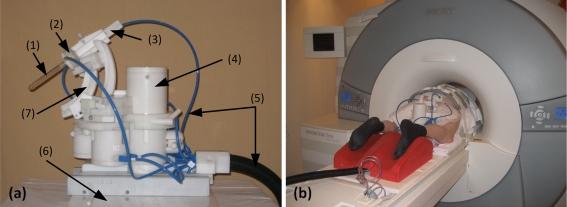
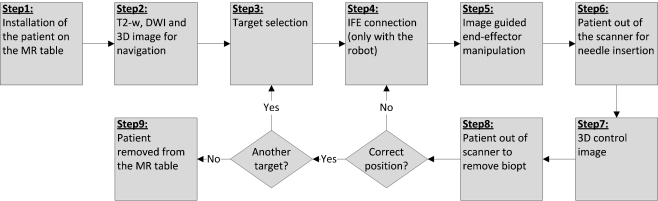
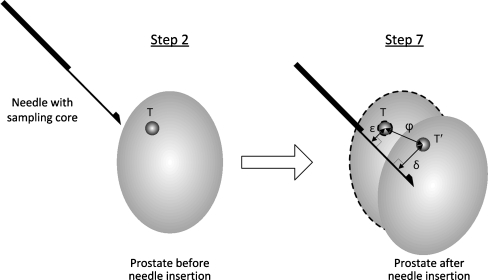
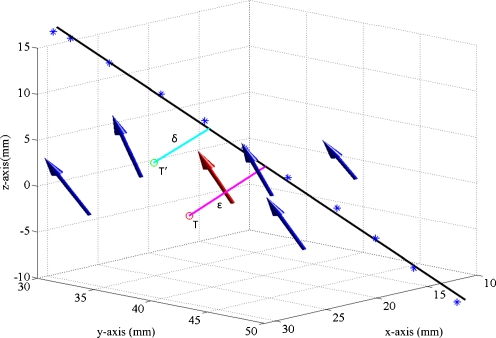
A pneumatic controlled MR-compatible manipulator with 5 degrees of freedom was developed in-house to guide biopsies under real-time imaging. From 13 consecutive biopsy procedures, the targeting error, biopsy error and target displacement were calculated to evaluate the accuracy. The time was recorded to evaluate manipulation and procedure time.
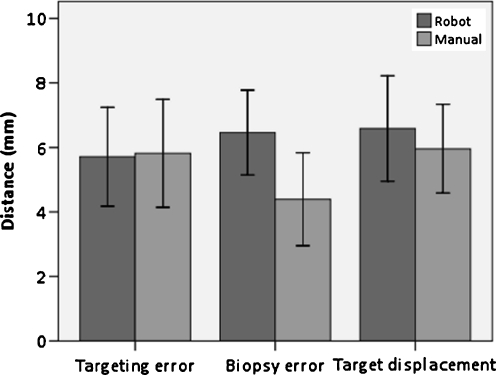
The robotic and manual techniques demonstrated comparable results regarding mean targeting error (5.7 vs 5.8 mm, respectively) and mean target displacement (6.6 vs 6.0 mm, respectively). The mean biopsy error was larger (6.5 vs 4.4 mm) when using the robotic technique, although not significant. Mean procedure and manipulation time were 76 min and 6 min, respectively using the robotic technique and 61 and 8 min with the manual technique.
Although comparable results regarding accuracy and speed were found, the extended technical effort of the robotic technique make the manual technique - currently - more suitable to perform MRI-guided biopsies. Furthermore, this study provided a better insight in displacement of the target during in vivo biopsy procedures.
评估一种新型机器人技术在协助对有癌症可疑区域的患者进行磁共振成像(MRI)引导的前列腺活检中的准确性和速度。
开发了一种内部的气动控制的、具有 5 个自由度的磁共振兼容操纵器,以在实时成像下引导活检。从 13 次连续的活检过程中,计算了靶向误差、活检误差和目标位移,以评估准确性。记录时间以评估操作和程序时间。
机器人技术和手动技术在平均靶向误差(分别为 5.7 和 5.8 毫米)和平均目标位移(分别为 6.6 和 6.0 毫米)方面表现出相当的结果。虽然机器人技术的活检误差平均值较大(6.5 与 4.4 毫米),但并不显著。机器人技术的平均程序和操作时间分别为 76 分钟和 6 分钟,而手动技术的平均程序和操作时间分别为 61 分钟和 8 分钟。
虽然在准确性和速度方面发现了相当的结果,但机器人技术的扩展技术工作使得手动技术 - 当前 - 更适合进行 MRI 引导的活检。此外,本研究更深入地了解了在体内活检过程中目标的位移。