Brain Science Institute, RIKEN, Wako, Japan.
PLoS Comput Biol. 2011 Oct;7(10):e1002221. doi: 10.1371/journal.pcbi.1002221. Epub 2011 Oct 20.
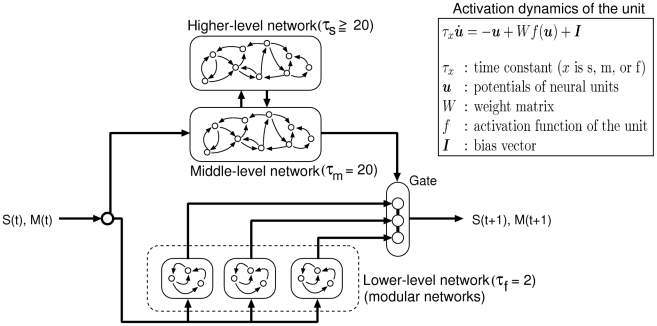
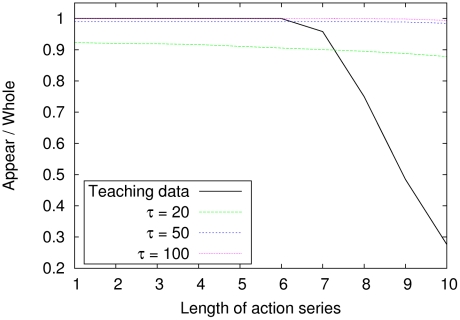
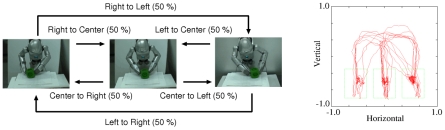
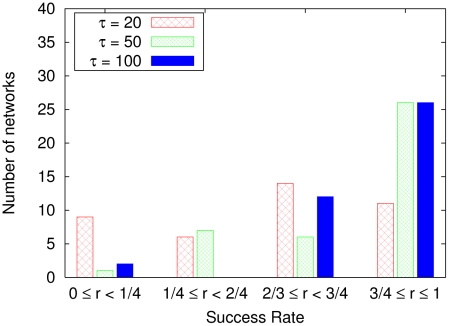
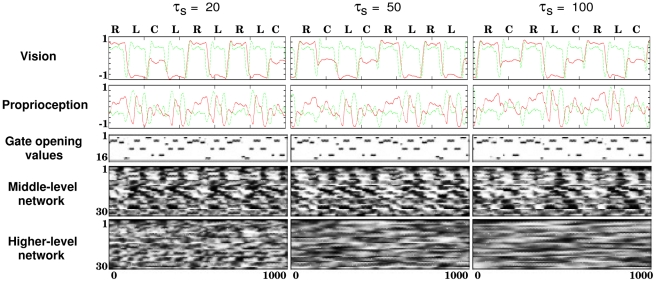
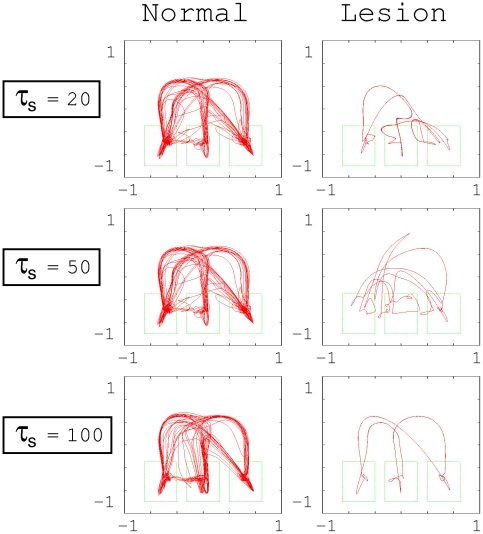
The current article suggests that deterministic chaos self-organized in cortical dynamics could be responsible for the generation of spontaneous action sequences. Recently, various psychological observations have suggested that humans and primates can learn to extract statistical structures hidden in perceptual sequences experienced during active environmental interactions. Although it has been suggested that such statistical structures involve chunking or compositional primitives, their neuronal implementations in brains have not yet been clarified. Therefore, to reconstruct the phenomena, synthetic neuro-robotics experiments were conducted by using a neural network model, which is characterized by a generative model with intentional states and its multiple timescales dynamics. The experimental results showed that the robot successfully learned to imitate tutored behavioral sequence patterns by extracting the underlying transition probability among primitive actions. An analysis revealed that a set of primitive action patterns was embedded in the fast dynamics part, and the chaotic dynamics of spontaneously sequencing these action primitive patterns was structured in the slow dynamics part, provided that the timescale was adequately set for each part. It was also shown that self-organization of this type of functional hierarchy ensured robust action generation by the robot in its interactions with a noisy environment. This article discusses the correspondence of the synthetic experiments with the known hierarchy of the prefrontal cortex, the supplementary motor area, and the primary motor cortex for action generation. We speculate that deterministic dynamical structures organized in the prefrontal cortex could be essential because they can account for the generation of both intentional behaviors of fixed action sequences and spontaneous behaviors of pseudo-stochastic action sequences by the same mechanism.
本文提出,皮质动力学中的确定性混沌自组织可能是自发动作序列产生的原因。最近,各种心理学观察表明,人类和灵长类动物可以学习提取在主动环境交互过程中经历的感知序列中隐藏的统计结构。尽管有人认为这些统计结构涉及到块或组合基元,但它们在大脑中的神经元实现尚未得到澄清。因此,为了重建这些现象,通过使用具有意向状态及其多个时间尺度动力学的神经网络模型进行了合成神经机器人实验。实验结果表明,机器人通过提取基本动作之间的潜在转移概率,成功地学会了通过提取基本动作之间的潜在转移概率来模仿受指导的行为序列模式。分析表明,一组基本动作模式嵌入在快速动力学部分,并且这些动作基本模式的混沌动力学在慢动力学部分被结构化,前提是为每个部分设置足够的时间尺度。还表明,这种类型的功能层次结构的自组织确保了机器人在与嘈杂环境的交互中生成稳健的动作。本文讨论了合成实验与已知的前额叶皮层、辅助运动区和初级运动皮层的对应关系,用于生成动作。我们推测,前额叶皮层中的确定性动力结构可能是必不可少的,因为它们可以用相同的机制解释固定动作序列的意向行为和伪随机动作序列的自发行为的产生。