Department of Agro-Forestry Engineering, University of Lleida, Avinguda Rovira Roure 191, 25198 Lleida, Spain.
Sensors (Basel). 2011;11(3):2751-72. doi: 10.3390/s110302751. Epub 2011 Mar 2.
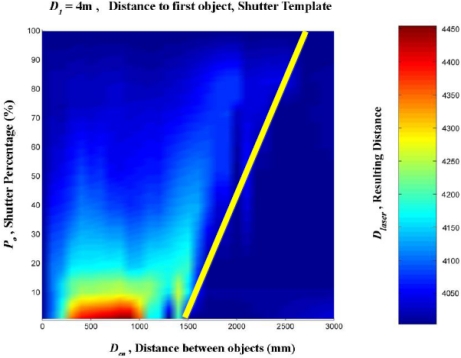
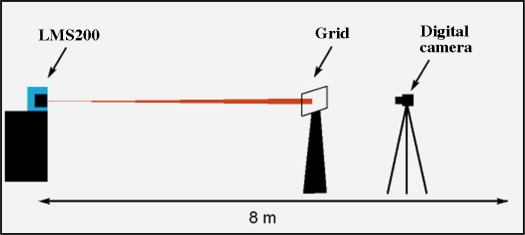
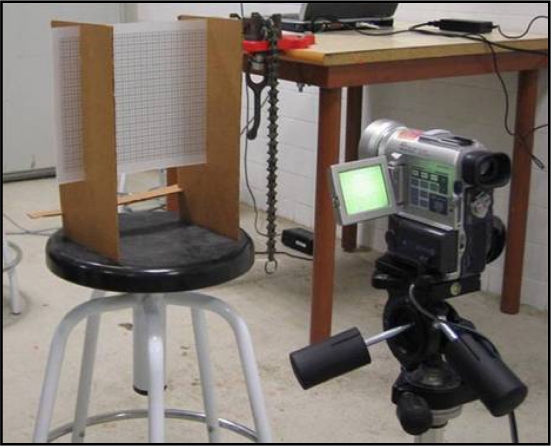
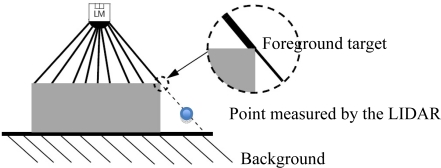
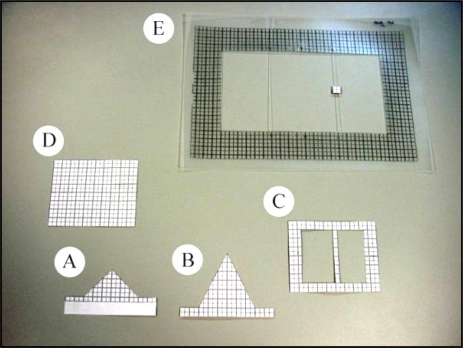
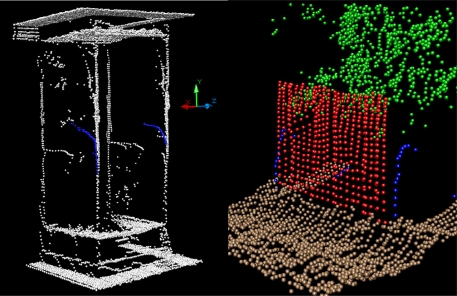
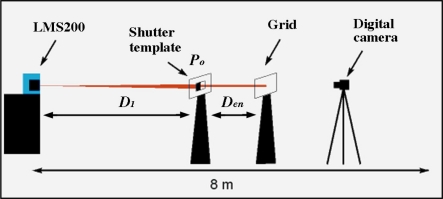
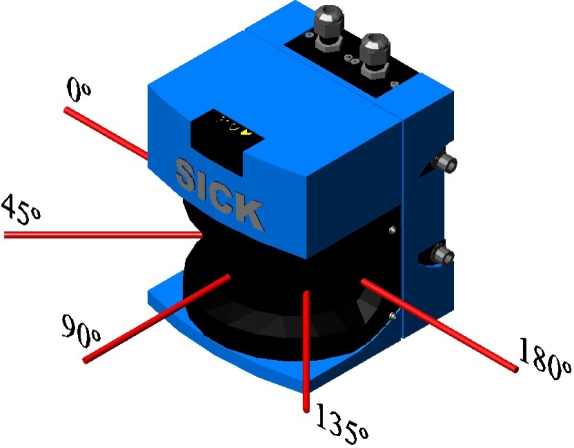
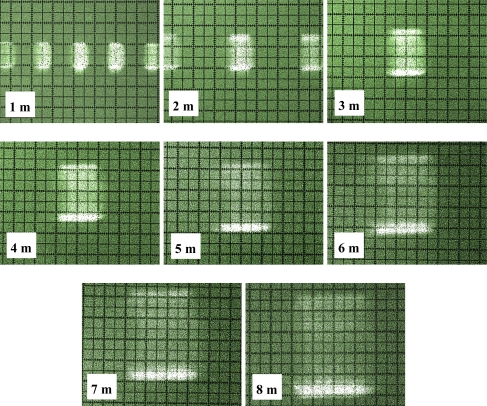
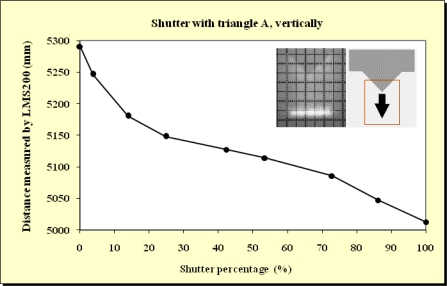
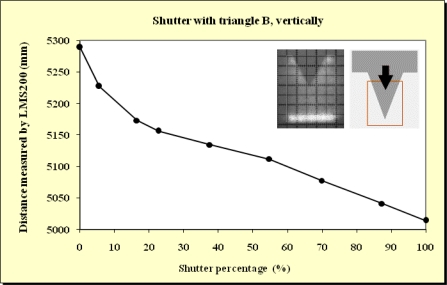
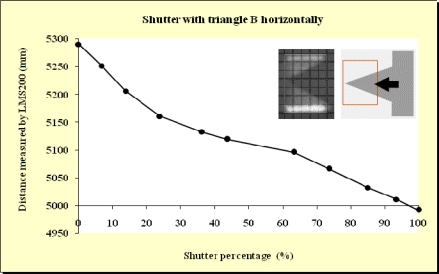
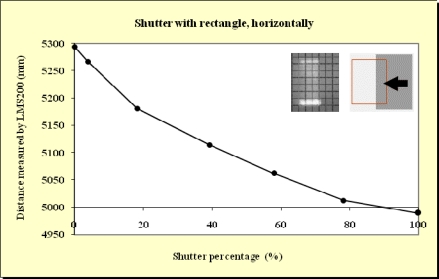
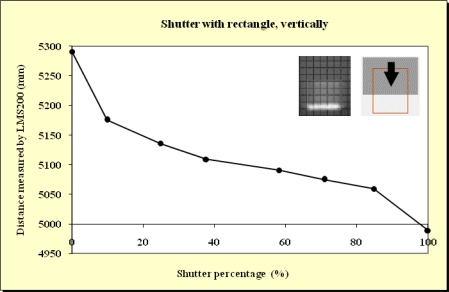
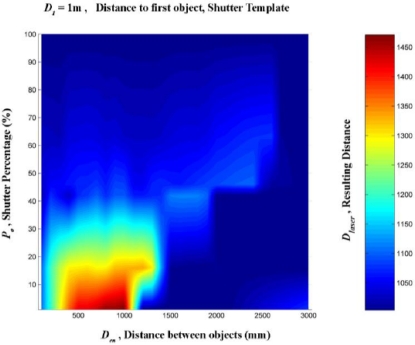
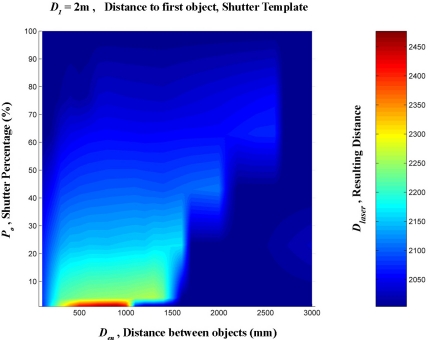
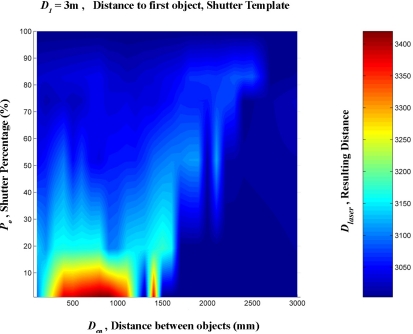
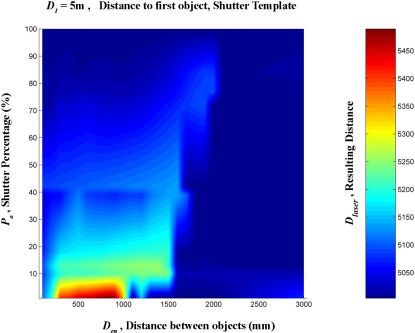
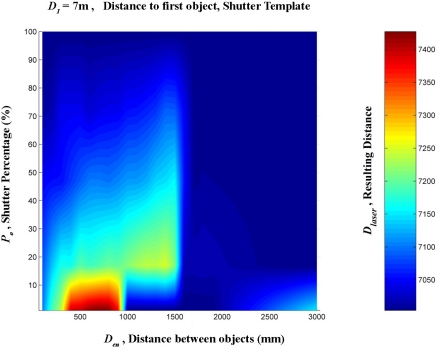
The geometric characterisation of tree orchards is a high-precision activity comprising the accurate measurement and knowledge of the geometry and structure of the trees. Different types of sensors can be used to perform this characterisation. In this work a terrestrial LIDAR sensor (SICK LMS200) whose emission source was a 905-nm pulsed laser diode was used. Given the known dimensions of the laser beam cross-section (with diameters ranging from 12 mm at the point of emission to 47.2 mm at a distance of 8 m), and the known dimensions of the elements that make up the crops under study (flowers, leaves, fruits, branches, trunks), it was anticipated that, for much of the time, the laser beam would only partially hit a foreground target/object, with the consequent problem of mixed pixels or edge effects. Understanding what happens in such situations was the principal objective of this work. With this in mind, a series of tests were set up to determine the geometry of the emitted beam and to determine the response of the sensor to different beam blockage scenarios. The main conclusions that were drawn from the results obtained were: (i) in a partial beam blockage scenario, the distance value given by the sensor depends more on the blocked radiant power than on the blocked surface area; (ii) there is an area that influences the measurements obtained that is dependent on the percentage of blockage and which ranges from 1.5 to 2.5 m with respect to the foreground target/object. If the laser beam impacts on a second target/object located within this range, this will affect the measurement given by the sensor. To interpret the information obtained from the point clouds provided by the LIDAR sensors, such as the volume occupied and the enclosing area, it is necessary to know the resolution and the process for obtaining this mesh of points and also to be aware of the problem associated with mixed pixels.
果园的几何特征是一项高精度的活动,包括对树木的几何形状和结构进行精确测量和了解。可以使用不同类型的传感器来执行这种特征描述。在这项工作中,使用了一种地面激光雷达传感器(SICK LMS200),其发射源是一个 905nm 的脉冲激光二极管。考虑到激光束横截面的已知尺寸(在发射点的直径范围为 12mm 到 8m 处的 47.2mm),以及构成研究作物的元素(花、叶、果实、树枝、树干)的已知尺寸,可以预期,在大多数情况下,激光束只会部分命中前景目标/物体,从而产生混合像素或边缘效应的问题。了解这种情况下会发生什么是这项工作的主要目标。考虑到这一点,进行了一系列测试来确定发射光束的几何形状,并确定传感器对不同光束阻挡情况的响应。从获得的结果中得出的主要结论是:(i)在部分光束阻挡情况下,传感器给出的距离值更多地取决于被阻挡的辐射功率,而不是被阻挡的表面积;(ii)存在一个影响测量结果的区域,该区域取决于阻挡百分比,范围从 1.5 到 2.5m,相对于前景目标/物体。如果激光束撞击位于该范围内的第二个目标/物体,这将影响传感器给出的测量值。为了解释从激光雷达传感器提供的点云中获得的信息,例如所占据的体积和包围面积,有必要了解获得该点网格的分辨率和过程,并且还要意识到与混合像素相关的问题。