Department of Computer Science and Industrial Engineering, University of Lleida, Lleida, Spain.
Sensors (Basel). 2012;12(6):7701-18. doi: 10.3390/s120607701. Epub 2012 Jun 7.
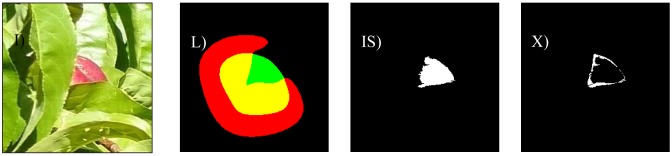
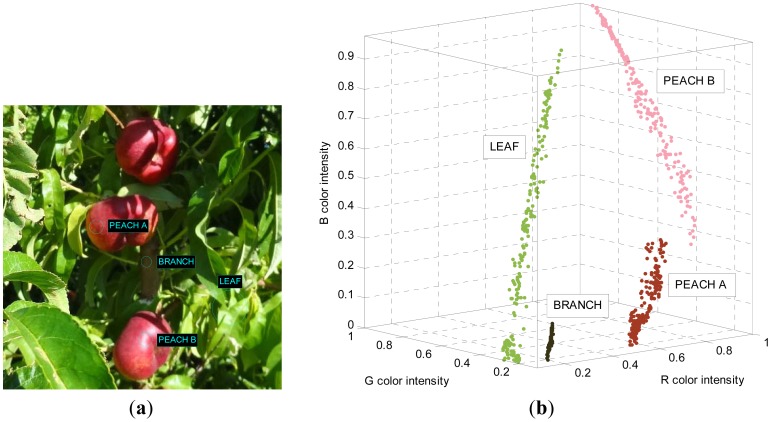
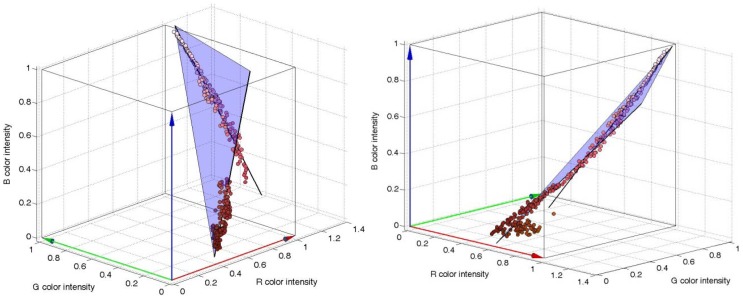
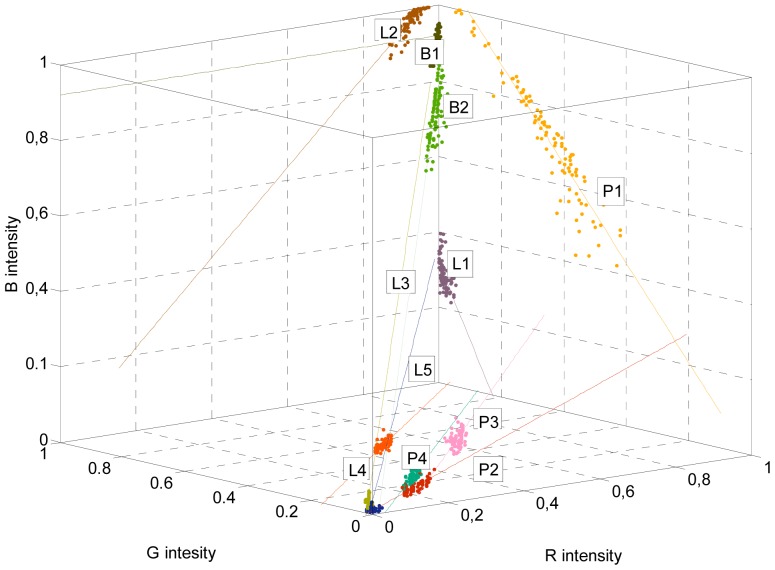
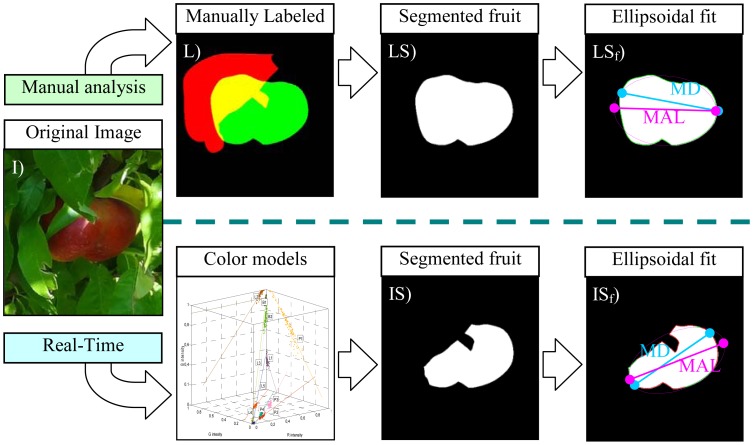
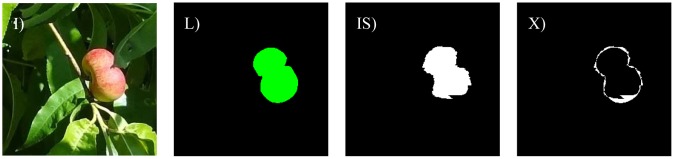
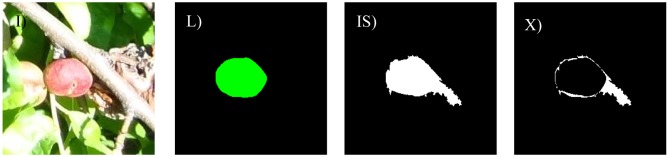
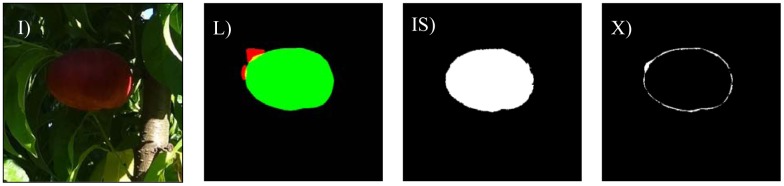
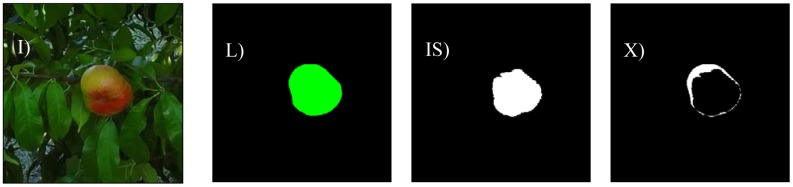
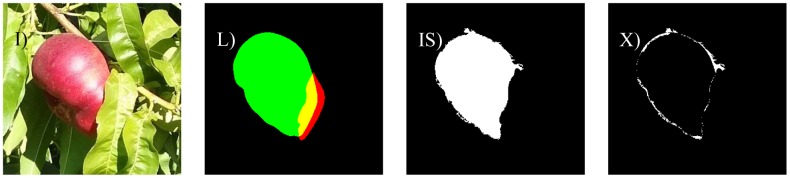
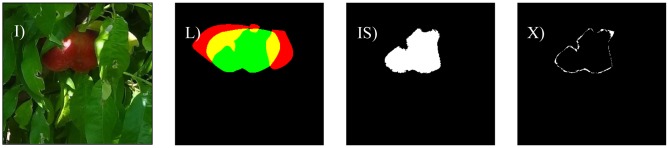
This work proposes the detection of red peaches in orchard images based on the definition of different linear color models in the RGB vector color space. The classification and segmentation of the pixels of the image is then performed by comparing the color distance from each pixel to the different previously defined linear color models. The methodology proposed has been tested with images obtained in a real orchard under natural light. The peach variety in the orchard was the paraguayo (Prunus persica var. platycarpa) peach with red skin. The segmentation results showed that the area of the red peaches in the images was detected with an average error of 11.6%; 19.7% in the case of bright illumination; 8.2% in the case of low illumination; 8.6% for occlusion up to 33%; 12.2% in the case of occlusion between 34 and 66%; and 23% for occlusion above 66%. Finally, a methodology was proposed to estimate the diameter of the fruits based on an ellipsoidal fitting. A first diameter was obtained by using all the contour pixels and a second diameter was obtained by rejecting some pixels of the contour. This approach enables a rough estimate of the fruit occlusion percentage range by comparing the two diameter estimates.
本工作提出了一种基于 RGB 向量颜色空间中不同线性颜色模型定义的果园图像中红桃的检测方法。然后通过比较每个像素到不同预先定义的线性颜色模型的颜色距离来对图像的像素进行分类和分割。所提出的方法已经在自然光下的真实果园中获得的图像上进行了测试。果园中的桃品种是红皮的 paraguayo(Prunus persica var. platycarpa)桃。分割结果表明,图像中红桃的面积检测平均误差为 11.6%;在明亮光照下为 19.7%;在低光照下为 8.2%;在遮挡度达到 33%时为 8.6%;在遮挡度在 34%至 66%之间时为 12.2%;在遮挡度超过 66%时为 23%。最后,提出了一种基于椭圆拟合的果实直径估计方法。通过使用所有轮廓像素得到第一个直径,通过拒绝轮廓的一些像素得到第二个直径。通过比较两个直径估计值,可以粗略估计果实遮挡百分比的范围。