Sensory Motor Performance Program, Rehabilitation Institute of Chicago, Chicago, 60611 IL, USA.
J Neuroeng Rehabil. 2012 Aug 20;9:57. doi: 10.1186/1743-0003-9-57.
Clinical outcomes after robotic training are often not superior to conventional therapy. One key factor responsible for this is the use of control strategies that provide substantial guidance. This strategy not only leads to a reduction in volitional physical effort, but also interferes with motor relearning.
We tested the feasibility of a novel training approach (active robotic training) using a powered gait orthosis (Lokomat) in mitigating post-stroke gait impairments of a 52-year-old male stroke survivor. This gait training paradigm combined patient-cooperative robot-aided walking with a target-tracking task. The training lasted for 4-weeks (12 visits, 3 × per week). The subject's neuromotor performance and recovery were evaluated using biomechanical, neuromuscular and clinical measures recorded at various time-points (pre-training, post-training, and 6-weeks after training).
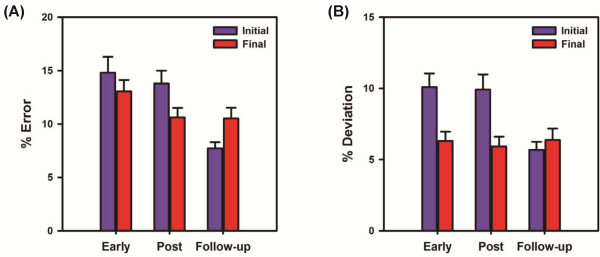
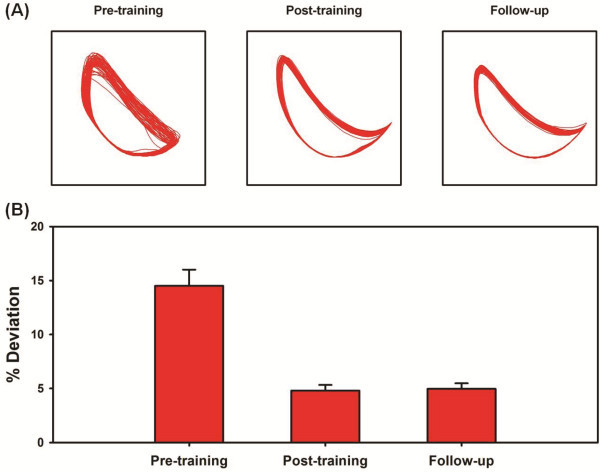
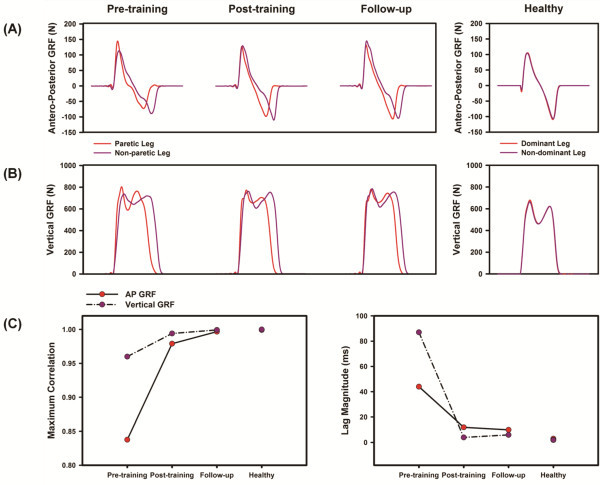
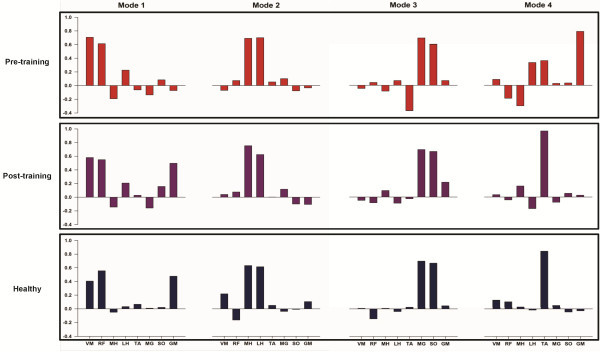
Active robotic training resulted in considerable increase in target-tracking accuracy and reduction in the kinematic variability of ankle trajectory during robot-aided treadmill walking. These improvements also transferred to overground walking as characterized by larger propulsive forces and more symmetric ground reaction forces (GRFs). Training also resulted in improvements in muscle coordination, which resembled patterns observed in healthy controls. These changes were accompanied by a reduction in motor cortical excitability (MCE) of the vastus medialis, medial hamstrings, and gluteus medius muscles during treadmill walking. Importantly, active robotic training resulted in substantial improvements in several standard clinical and functional parameters. These improvements persisted during the follow-up evaluation at 6 weeks.
The results indicate that active robotic training appears to be a promising way of facilitating gait and physical function in moderately impaired stroke survivors.
机器人训练后的临床效果通常并不优于传统疗法。造成这种情况的一个关键因素是使用提供大量指导的控制策略。这种策略不仅导致意志物理努力的减少,而且还干扰运动再学习。
我们使用动力步态矫形器(Lokomat)测试了一种新的训练方法(主动机器人训练)在减轻 52 岁男性卒中幸存者卒中后步态障碍方面的可行性。这种步态训练范式将患者合作的机器人辅助行走与目标跟踪任务相结合。训练持续 4 周(12 次访问,每周 3 次)。在不同时间点(训练前、训练后和训练后 6 周)记录生物力学、神经肌肉和临床测量值,以评估患者的神经运动表现和恢复情况。
主动机器人训练可显著提高目标跟踪的准确性,并降低机器人辅助跑步机行走过程中踝关节轨迹的运动学可变性。这些改进也转移到了地面行走,表现为更大的推进力和更对称的地面反作用力(GRF)。训练还导致肌肉协调性的改善,这类似于健康对照组观察到的模式。这些变化伴随着股直肌、内收肌和臀中肌在跑步机行走时运动皮层兴奋性(MCE)的降低。重要的是,主动机器人训练导致几个标准的临床和功能参数的显著改善。这些改善在 6 周的随访评估中仍然存在。
结果表明,主动机器人训练似乎是一种很有前途的方法,可以促进中度受损的卒中幸存者的步态和身体功能。