Institute for Biomedical Technology and Technical Medicine MIRA, Department of Biomechanical Engineering, University of Twente, Enschede, The Netherlands.
J Neuroeng Rehabil. 2013 Jan 21;10:3. doi: 10.1186/1743-0003-10-3.
Robot-aided gait training is an emerging clinical tool for gait rehabilitation of neurological patients. This paper deals with a novel method of offering gait assistance, using an impedance controlled exoskeleton (LOPES). The provided assistance is based on a recent finding that, in the control of walking, different modules can be discerned that are associated with different subtasks. In this study, a Virtual Model Controller (VMC) for supporting one of these subtasks, namely the foot clearance, is presented and evaluated.
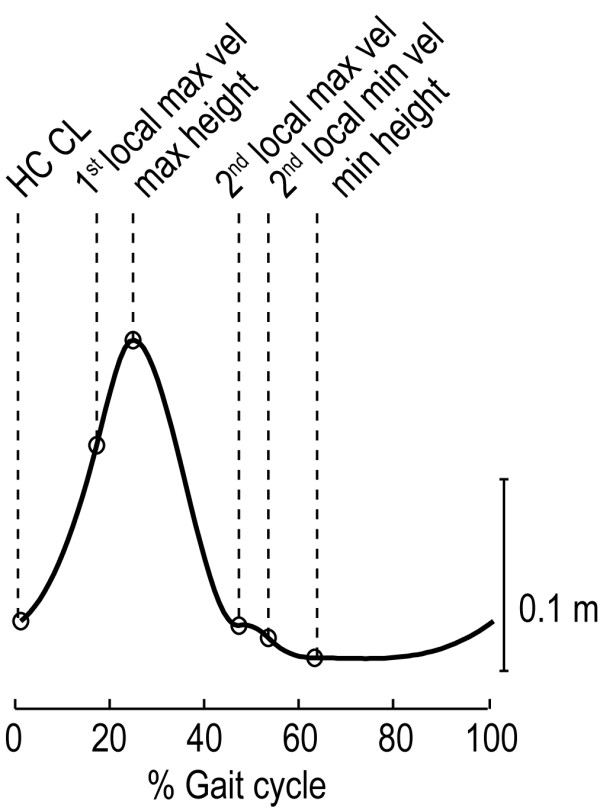
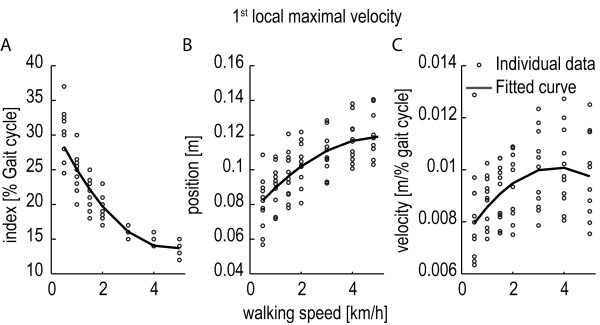
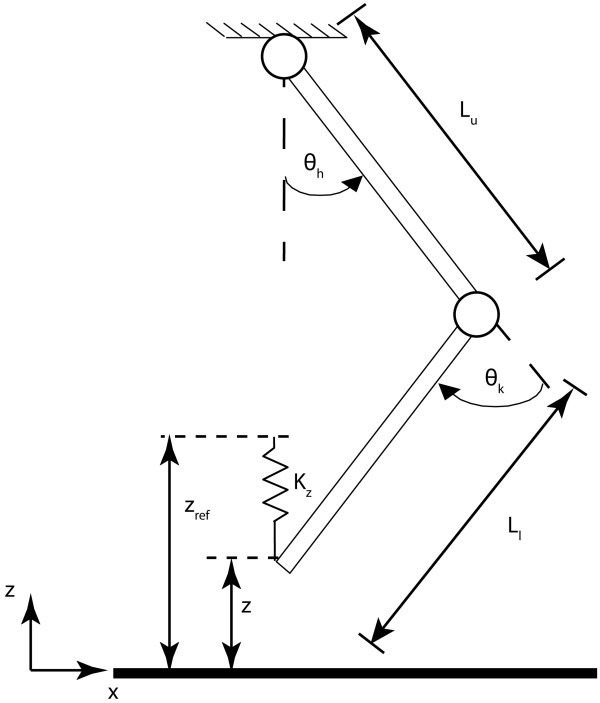
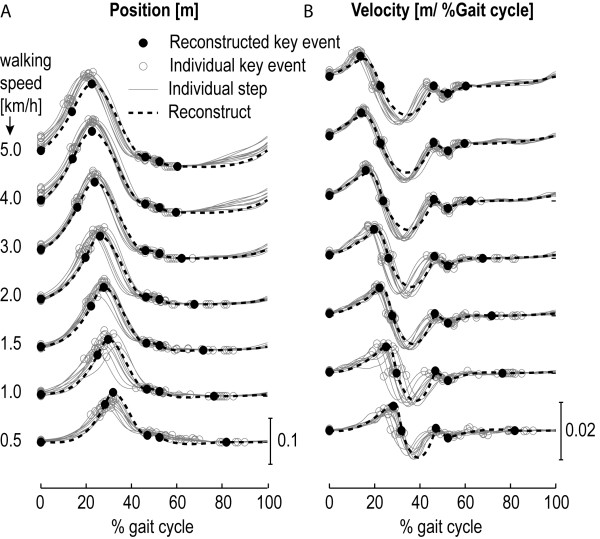
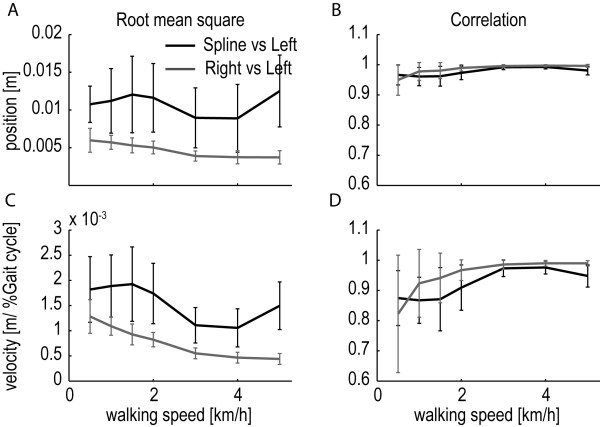
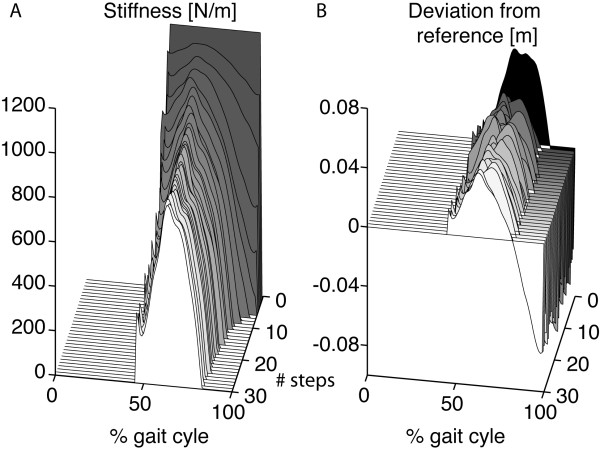
The developed VMC provides virtual support at the ankle, to increase foot clearance. Therefore, we first developed a new method to derive reference trajectories of the ankle position. These trajectories consist of splines between key events, which are dependent on walking speed and body height. Subsequently, the VMC was evaluated in twelve healthy subjects and six chronic stroke survivors. The impedance levels, of the support, were altered between trials to investigate whether the controller allowed gradual and selective support. Additionally, an adaptive algorithm was tested, that automatically shaped the amount of support to the subjects' needs. Catch trials were introduced to determine whether the subjects tended to rely on the support. We also assessed the additional value of providing visual feedback.
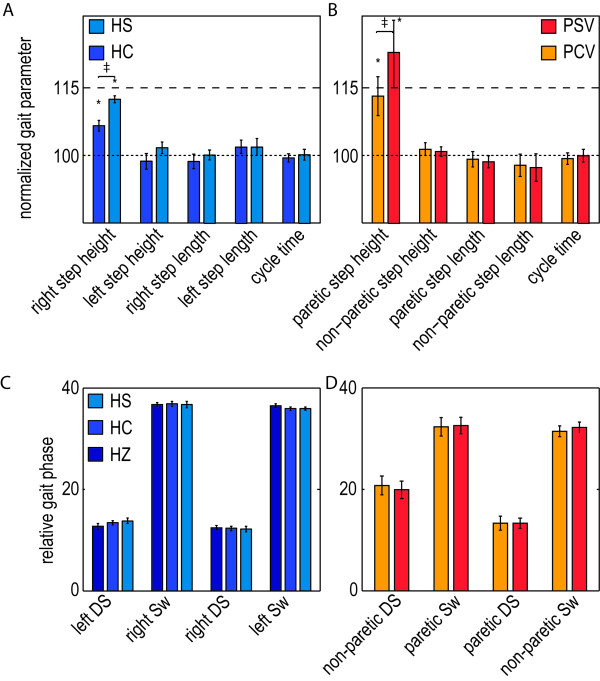
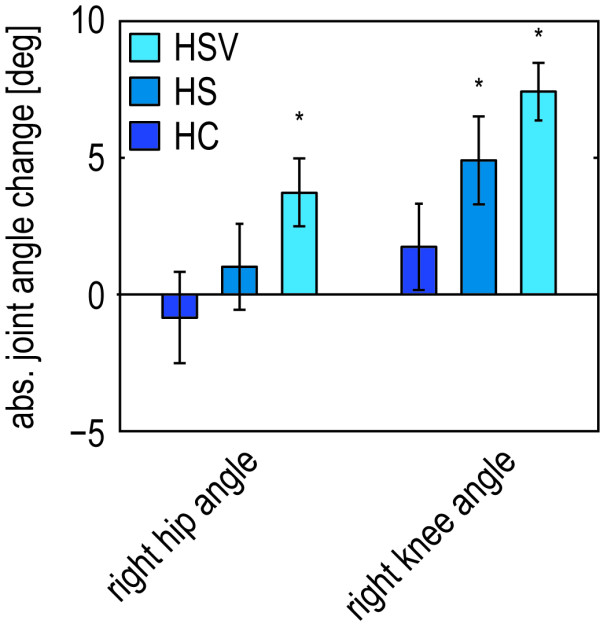
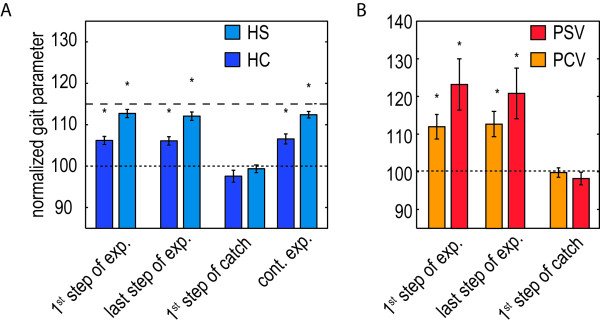
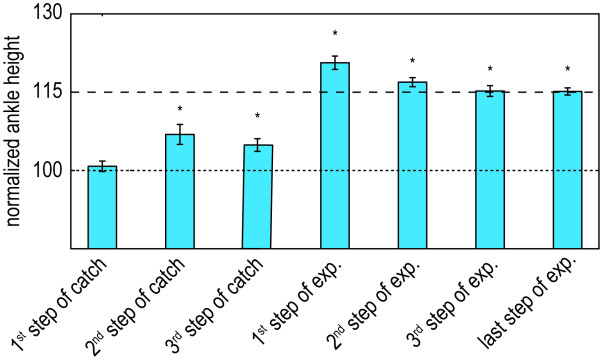
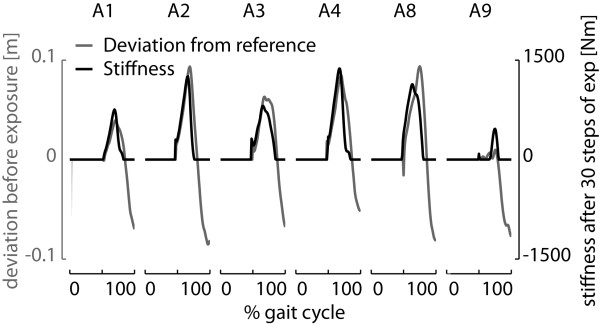
With the VMC, the step height could be selectively and gradually influenced. The adaptive algorithm clearly shaped the support level to the specific needs of every stroke survivor. The provided support did not result in reliance on the support for both groups. All healthy subjects and most patients were able to utilize the visual feedback to increase their active participation.
The presented approach can provide selective control on one of the essential subtasks of walking. This module is the first in a set of modules to control all subtasks. This enables the therapist to focus the support on the subtasks that are impaired, and leave the other subtasks up to the patient, encouraging him to participate more actively in the training. Additionally, the speed-dependent reference patterns provide the therapist with the tools to easily adapt the treadmill speed to the capabilities and progress of the patient.
机器人辅助步态训练是一种新兴的神经患者步态康复临床工具。本文介绍了一种提供步态辅助的新方法,即使用阻抗控制的外骨骼(LOPES)。所提供的辅助是基于最近的一项发现,即在控制行走时,可以区分出与不同子任务相关的不同模块。在这项研究中,提出并评估了一种用于支持其中一个子任务(即足廓清)的虚拟模型控制器(VMC)。
所开发的 VMC 在踝关节处提供虚拟支撑,以增加足廓清。因此,我们首先开发了一种新方法来推导出踝关节位置的参考轨迹。这些轨迹由关键事件之间的样条组成,关键事件取决于步行速度和身高。随后,在 12 名健康受试者和 6 名慢性脑卒中幸存者中评估了 VMC。在试验之间改变支撑的阻抗水平,以研究控制器是否允许逐渐和选择性的支撑。此外,还测试了一种自适应算法,该算法可以根据受试者的需求自动调整支撑的程度。引入捕捉试验以确定受试者是否倾向于依赖支撑。我们还评估了提供视觉反馈的附加价值。
使用 VMC,可以有选择性和逐渐地影响步幅高度。自适应算法清楚地根据每个脑卒中幸存者的特定需求调整了支撑水平。提供的支撑并没有导致两组受试者对支撑的依赖。所有健康受试者和大多数患者都能够利用视觉反馈来增加他们的主动参与度。
所提出的方法可以对步行的一个基本子任务进行选择性控制。该模块是控制所有子任务的一组模块中的第一个。这使治疗师能够将支撑集中在受损的子任务上,而将其他子任务留给患者,鼓励他更积极地参与训练。此外,速度相关的参考模式为治疗师提供了工具,以便轻松地将跑步机速度适应患者的能力和进展。