Institute of Electronics, Technical University of Lodz, Lodz, Poland.
Sensors (Basel). 2012;12(6):6764-801. doi: 10.3390/s120606764. Epub 2012 May 25.
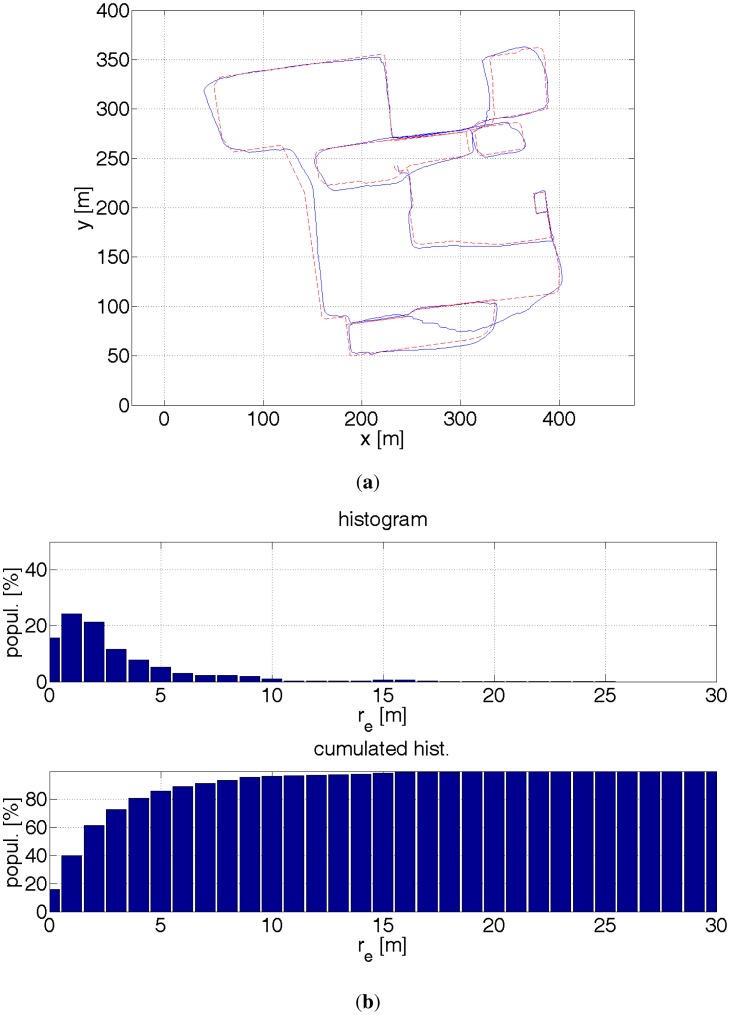
The paper presents an algorithm for estimating a pedestrian location in an urban environment. The algorithm is based on the particle filter and uses different data sources: a GPS receiver, inertial sensors, probability maps and a stereo camera. Inertial sensors are used to estimate a relative displacement of a pedestrian. A gyroscope estimates a change in the heading direction. An accelerometer is used to count a pedestrian's steps and their lengths. The so-called probability maps help to limit GPS inaccuracy by imposing constraints on pedestrian kinematics, e.g., it is assumed that a pedestrian cannot cross buildings, fences etc. This limits position inaccuracy to ca. 10 m. Incorporation of depth estimates derived from a stereo camera that are compared to the 3D model of an environment has enabled further reduction of positioning errors. As a result, for 90% of the time, the algorithm is able to estimate a pedestrian location with an error smaller than 2 m, compared to an error of 6.5 m for a navigation based solely on GPS.
本文提出了一种在城市环境中估计行人位置的算法。该算法基于粒子滤波器,并使用了不同的数据来源:GPS 接收器、惯性传感器、概率图和立体摄像机。惯性传感器用于估计行人的相对位移。陀螺仪用于估计行进方向的变化。加速度计用于计算行人的步数及其长度。所谓的概率图通过对行人运动学施加约束来帮助限制 GPS 的不准确性,例如,假设行人不能穿过建筑物、栅栏等。这将位置不准确性限制在大约 10 米以内。将从立体摄像机得出的深度估计值与环境的 3D 模型进行合并,从而进一步降低了定位误差。结果,在 90%的时间内,该算法能够以小于 2 米的误差估计行人的位置,而仅基于 GPS 的导航的误差为 6.5 米。