Department of Signal Theory, Communications and Telematics Engineering, University of Valladolid, 47011 Valladolid, Spain.
Sensors (Basel). 2013 Nov 8;13(11):15307-23. doi: 10.3390/s131115307.
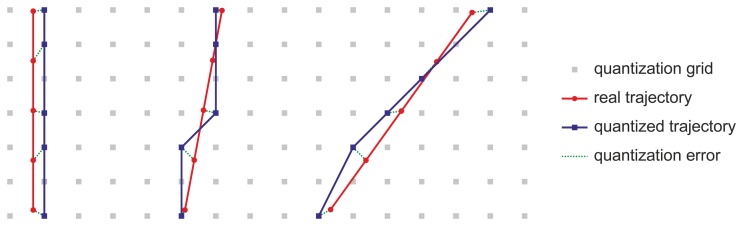
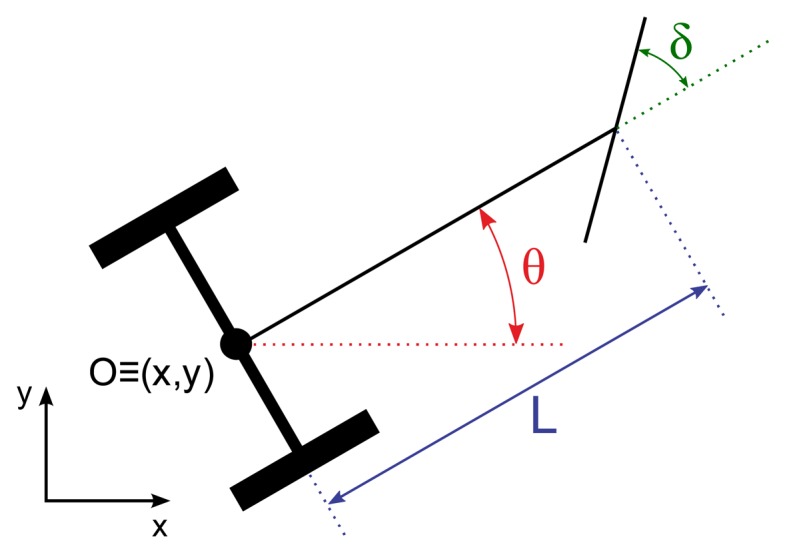
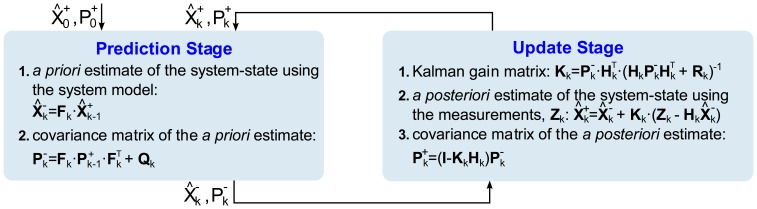
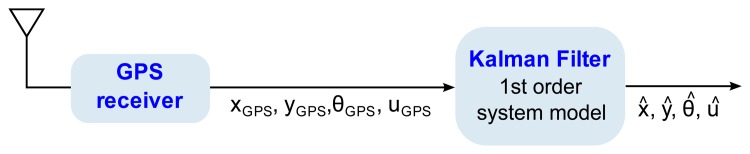
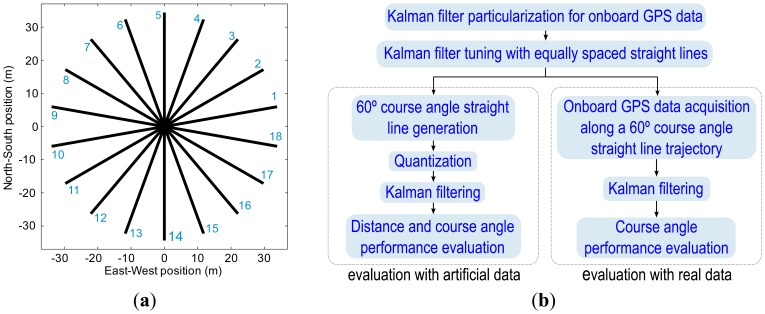
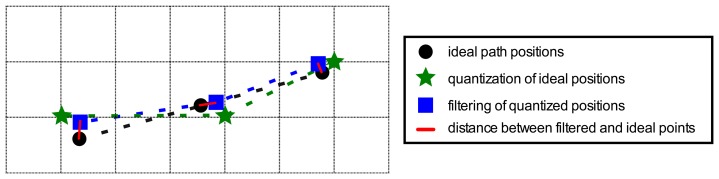
Low-cost GPS receivers provide geodetic positioning information using the NMEA protocol, usually with eight digits for latitude and nine digits for longitude. When these geodetic coordinates are converted into Cartesian coordinates, the positions fit in a quantization grid of some decimeters in size, the dimensions of which vary depending on the point of the terrestrial surface. The aim of this study is to reduce the quantization errors of some low-cost GPS receivers by using a Kalman filter. Kinematic tractor model equations were employed to particularize the filter, which was tuned by applying Monte Carlo techniques to eighteen straight trajectories, to select the covariance matrices that produced the lowest Root Mean Square Error in these trajectories. Filter performance was tested by using straight tractor paths, which were either simulated or real trajectories acquired by a GPS receiver. The results show that the filter can reduce the quantization error in distance by around 43%. Moreover, it reduces the standard deviation of the heading by 75%. Data suggest that the proposed filter can satisfactorily preprocess the low-cost GPS receiver data when used in an assistance guidance GPS system for tractors. It could also be useful to smooth tractor GPS trajectories that are sharpened when the tractor moves over rough terrain.
低成本 GPS 接收器使用 NMEA 协议提供大地定位信息,通常使用八位数字表示纬度和九位数字表示经度。当这些大地坐标转换为笛卡尔坐标时,位置会适应大小为几十厘米的量化网格,其尺寸取决于地面表面的位置。本研究的目的是通过使用卡尔曼滤波器降低一些低成本 GPS 接收器的量化误差。采用运动学拖拉机模型方程来具体说明滤波器,并通过应用蒙特卡罗技术对十八条直线轨迹进行调整,选择在这些轨迹中产生最低均方根误差的协方差矩阵。通过使用拖拉机的直线路径,或者通过 GPS 接收器获取的模拟或真实轨迹来测试滤波器的性能。结果表明,该滤波器可以将距离的量化误差降低约 43%。此外,它还可以将航向的标准偏差降低 75%。数据表明,当用于拖拉机的辅助引导 GPS 系统时,该滤波器可以很好地预处理低成本 GPS 接收器的数据。当拖拉机在不平坦的地形上行驶时,它还可以平滑拖拉机 GPS 轨迹,使其变得更加尖锐。