Hires Samuel Andrew, Pammer Lorenz, Svoboda Karel, Golomb David
Janelia Farm Research Campus, Howard Hughes Medical Institute, Ashburn, United States.
Elife. 2013 Nov 19;2:e01350. doi: 10.7554/eLife.01350.
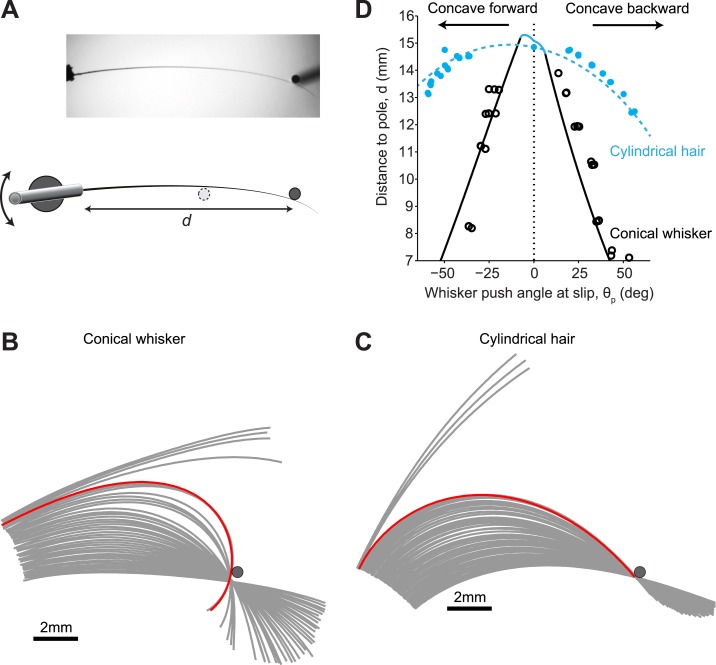
Many mammals forage and burrow in dark constrained spaces. Touch through facial whiskers is important during these activities, but the close quarters makes whisker deployment challenging. The diverse shapes of facial whiskers reflect distinct ecological niches. Rodent whiskers are conical, often with a remarkably linear taper. Here we use theoretical and experimental methods to analyze interactions of mouse whiskers with objects. When pushed into objects, conical whiskers suddenly slip at a critical angle. In contrast, cylindrical whiskers do not slip for biologically plausible movements. Conical whiskers sweep across objects and textures in characteristic sequences of brief sticks and slips, which provide information about the tactile world. In contrast, cylindrical whiskers stick and remain stuck, even when sweeping across fine textures. Thus the conical whisker structure is adaptive for sensor mobility in constrained environments and in feature extraction during active haptic exploration of objects and surfaces. DOI: http://dx.doi.org/10.7554/eLife.01350.001.
许多哺乳动物在黑暗狭窄的空间中觅食和挖掘洞穴。在这些活动中,通过面部胡须进行触摸非常重要,但狭窄的空间使得胡须的展开具有挑战性。面部胡须的多样形状反映了不同的生态位。啮齿动物的胡须呈圆锥形,通常具有明显的线性锥度。在这里,我们使用理论和实验方法来分析小鼠胡须与物体之间的相互作用。当被推向物体时,圆锥形胡须在临界角度会突然滑动。相比之下,圆柱形胡须在生物学上合理的运动情况下不会滑动。圆锥形胡须以短暂的粘附和滑动的特征序列扫过物体和纹理,这提供了有关触觉世界的信息。相比之下,圆柱形胡须即使扫过精细纹理也会粘附并保持粘附状态。因此,圆锥形胡须结构适合在受限环境中进行传感器移动以及在对物体和表面进行主动触觉探索时进行特征提取。DOI: http://dx.doi.org/10.7554/eLife.01350.001 。