Molloy Kevin, Shehu Amarda
BMC Struct Biol. 2013;13 Suppl 1(Suppl 1):S8. doi: 10.1186/1472-6807-13-S1-S8. Epub 2013 Nov 8.
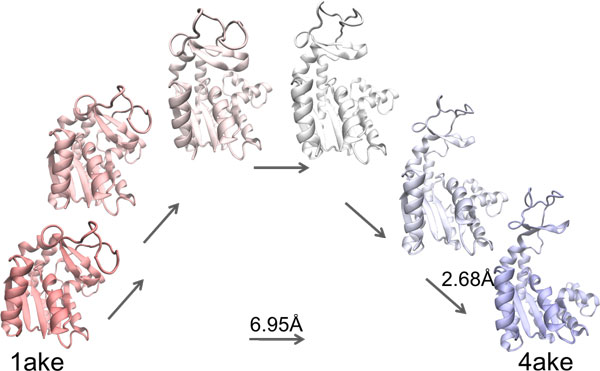
Many proteins tune their biological function by transitioning between different functional states, effectively acting as dynamic molecular machines. Detailed structural characterization of transition trajectories is central to understanding the relationship between protein dynamics and function. Computational approaches that build on the Molecular Dynamics framework are in principle able to model transition trajectories at great detail but also at considerable computational cost. Methods that delay consideration of dynamics and focus instead on elucidating energetically-credible conformational paths connecting two functionally-relevant structures provide a complementary approach. Effective sampling-based path planning methods originating in robotics have been recently proposed to produce conformational paths. These methods largely model short peptides or address large proteins by simplifying conformational space.
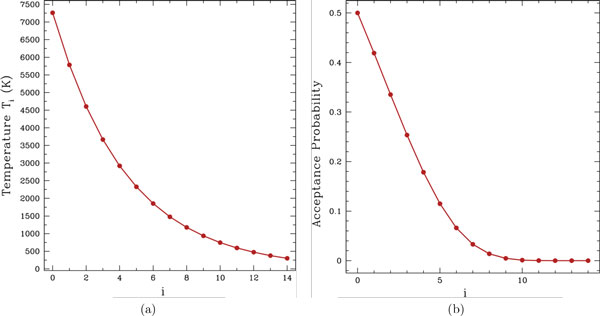
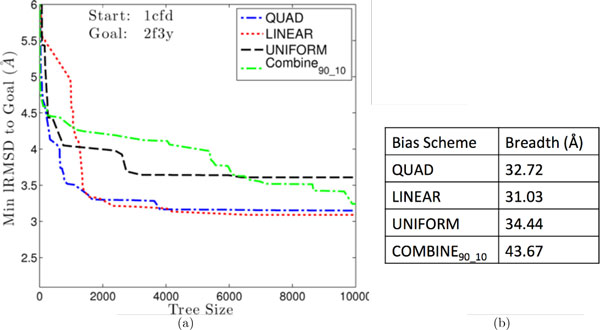
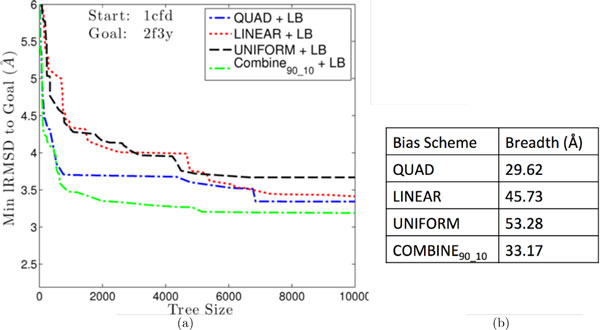
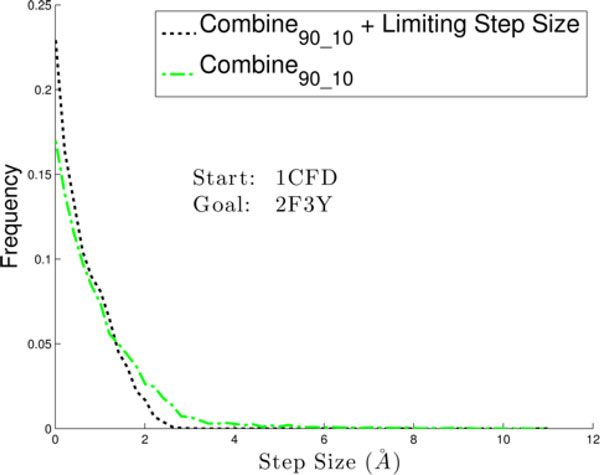
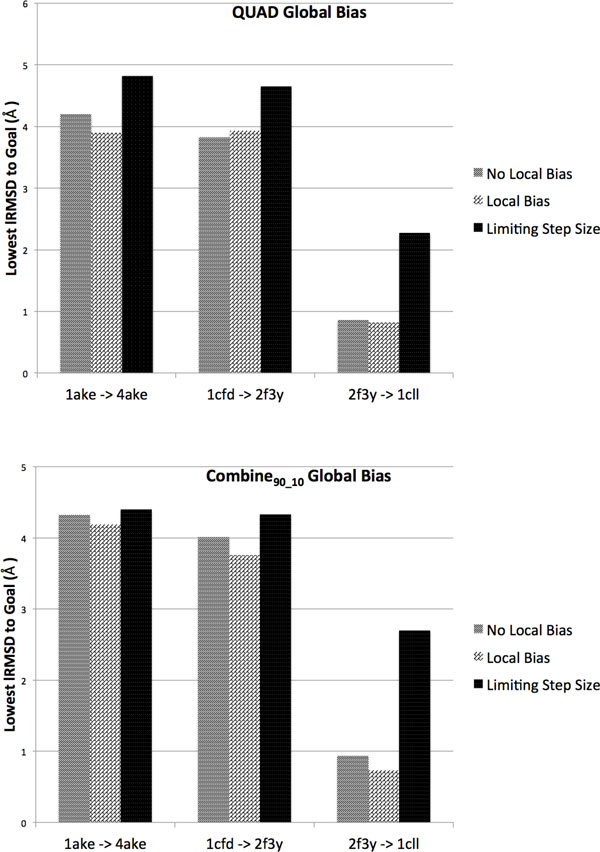
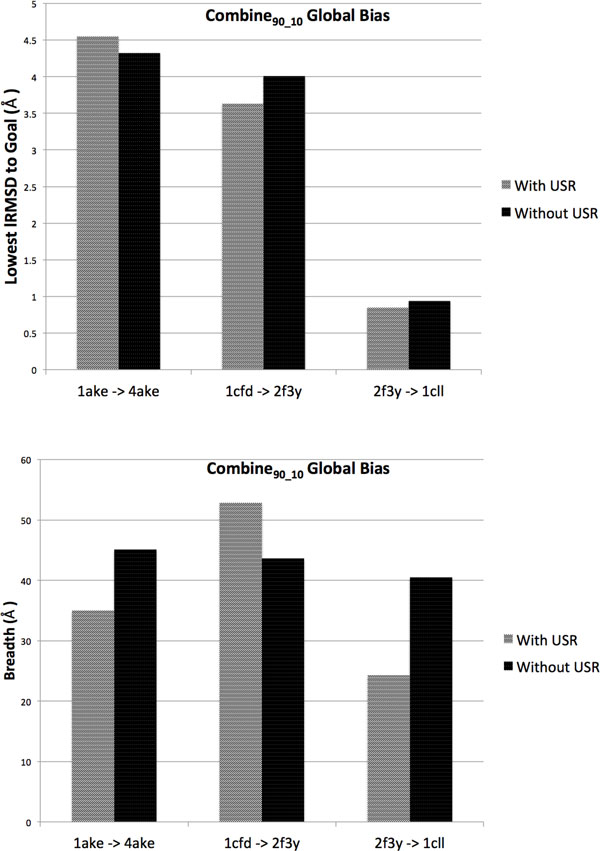
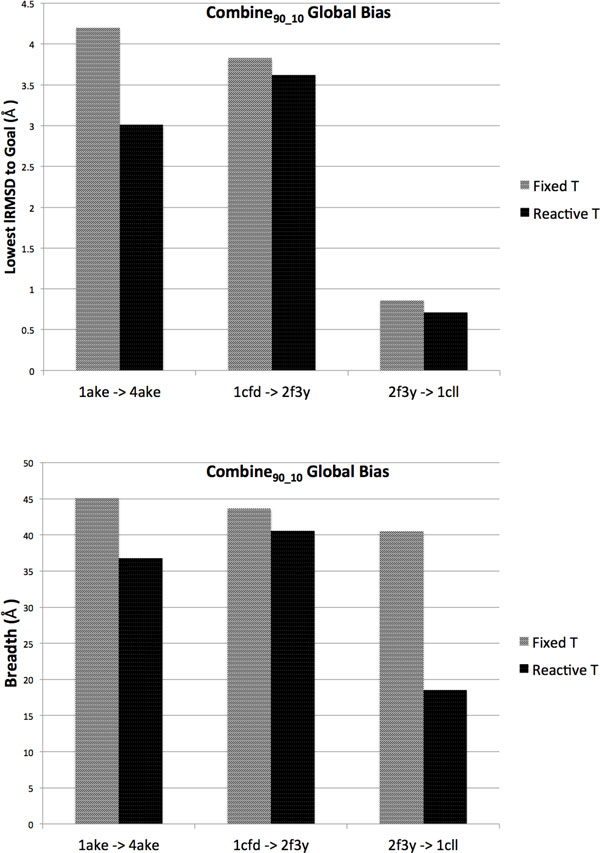
We propose a robotics-inspired method that connects two given structures of a protein by sampling conformational paths. The method focuses on small- to medium-size proteins, efficiently modeling structural deformations through the use of the molecular fragment replacement technique. In particular, the method grows a tree in conformational space rooted at the start structure, steering the tree to a goal region defined around the goal structure. We investigate various bias schemes over a progress coordinate for balance between coverage of conformational space and progress towards the goal. A geometric projection layer promotes path diversity. A reactive temperature scheme allows sampling of rare paths that cross energy barriers.
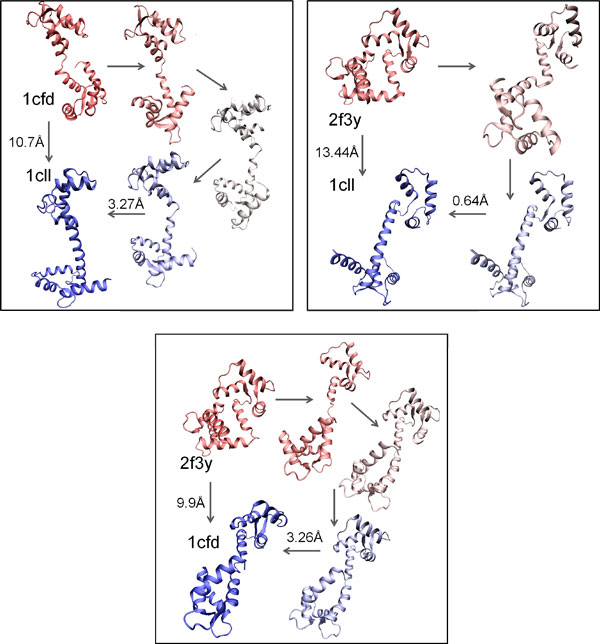
Experiments are conducted on small- to medium-size proteins of length up to 214 amino acids and with multiple known functionally-relevant states, some of which are more than 13Å apart of each-other. Analysis reveals that the method effectively obtains conformational paths connecting structural states that are significantly different. A detailed analysis on the depth and breadth of the tree suggests that a soft global bias over the progress coordinate enhances sampling and results in higher path diversity. The explicit geometric projection layer that biases the exploration away from over-sampled regions further increases coverage, often improving proximity to the goal by forcing the exploration to find new paths. The reactive temperature scheme is shown effective in increasing path diversity, particularly in difficult structural transitions with known high-energy barriers.
许多蛋白质通过在不同功能状态之间转换来调节其生物学功能,实际上起着动态分子机器的作用。转变轨迹的详细结构表征对于理解蛋白质动力学与功能之间的关系至关重要。基于分子动力学框架的计算方法原则上能够非常详细地模拟转变轨迹,但计算成本也相当高。延迟考虑动力学而专注于阐明连接两个功能相关结构的能量可信构象路径的方法提供了一种补充方法。最近提出了源自机器人技术的基于有效采样的路径规划方法来生成构象路径。这些方法主要对短肽进行建模,或者通过简化构象空间来处理大蛋白质。
我们提出了一种受机器人技术启发的方法,通过采样构象路径来连接蛋白质的两个给定结构。该方法专注于中小尺寸蛋白质,通过使用分子片段替换技术有效地对结构变形进行建模。特别是,该方法在构象空间中以起始结构为根生长一棵树,将树引导到围绕目标结构定义的目标区域。我们研究了在进展坐标上的各种偏差方案,以平衡构象空间的覆盖范围和朝着目标的进展。几何投影层促进路径多样性。反应温度方案允许对跨越能量障碍的罕见路径进行采样。
对长度达214个氨基酸且具有多个已知功能相关状态的中小尺寸蛋白质进行了实验,其中一些状态彼此相距超过13埃。分析表明,该方法有效地获得了连接显著不同结构状态的构象路径。对树的深度和广度的详细分析表明,在进展坐标上的软全局偏差增强了采样并导致更高的路径多样性。明确的几何投影层将探索从过度采样区域偏置开,进一步增加了覆盖范围,通常通过迫使探索找到新路径来提高与目标的接近度。反应温度方案在增加路径多样性方面显示出有效性,特别是在具有已知高能障碍的困难结构转变中。