IDIAP Research Institute Martigny, Switzerland.
Robotics and Mechatronics Center, German Aerospace Center (DLR) Weßling, Germany.
Front Neurorobot. 2014 Feb 25;8:8. doi: 10.3389/fnbot.2014.00008. eCollection 2014.
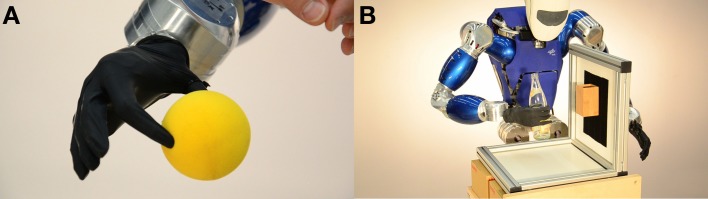
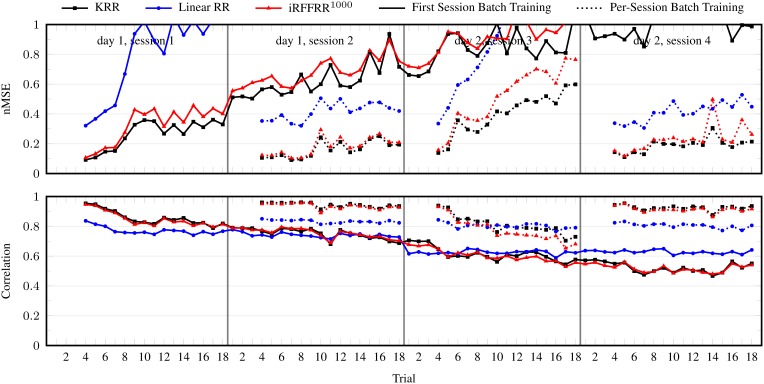
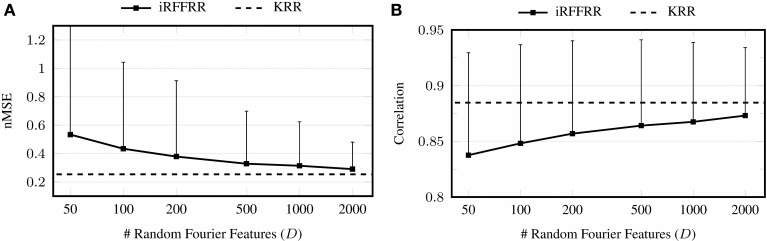
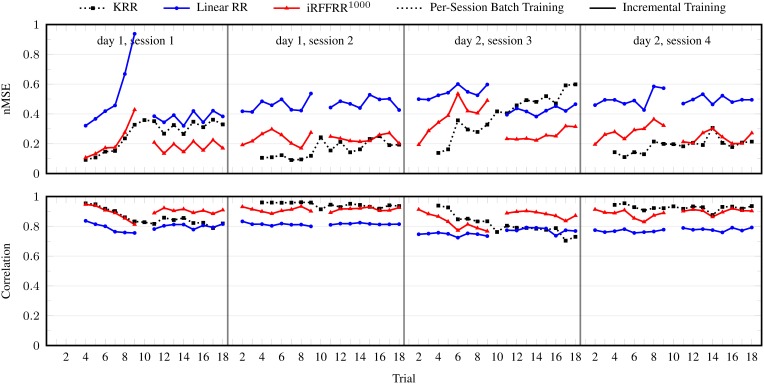
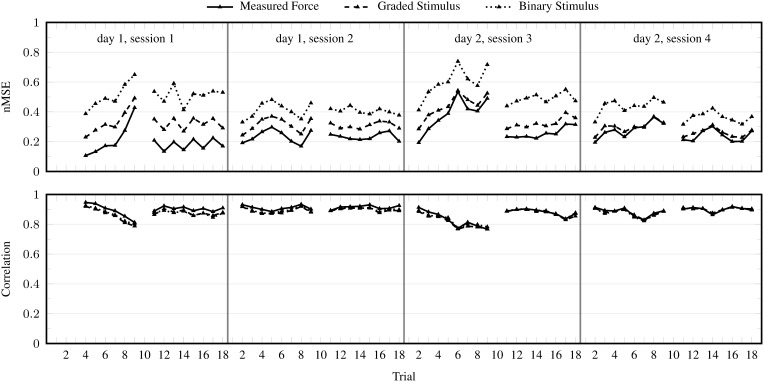
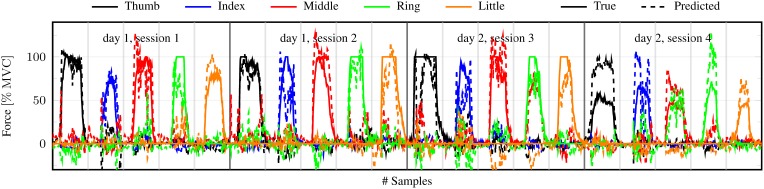
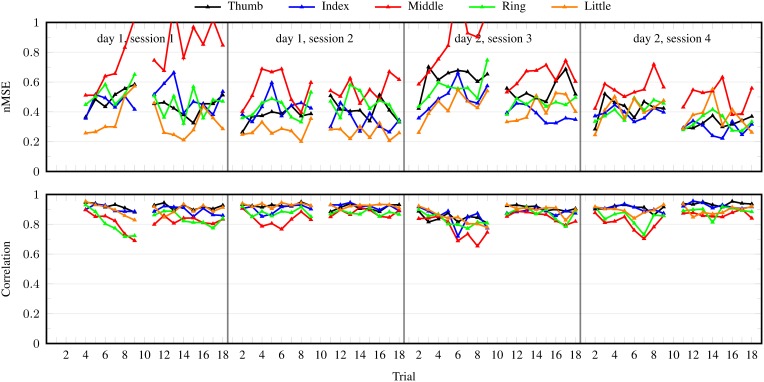
Stable myoelectric control of hand prostheses remains an open problem. The only successful human-machine interface is surface electromyography, typically allowing control of a few degrees of freedom. Machine learning techniques may have the potential to remove these limitations, but their performance is thus far inadequate: myoelectric signals change over time under the influence of various factors, deteriorating control performance. It is therefore necessary, in the standard approach, to regularly retrain a new model from scratch. We hereby propose a non-linear incremental learning method in which occasional updates with a modest amount of novel training data allow continual adaptation to the changes in the signals. In particular, Incremental Ridge Regression and an approximation of the Gaussian Kernel known as Random Fourier Features are combined to predict finger forces from myoelectric signals, both finger-by-finger and grouped in grasping patterns. We show that the approach is effective and practically applicable to this problem by first analyzing its performance while predicting single-finger forces. Surface electromyography and finger forces were collected from 10 intact subjects during four sessions spread over two different days; the results of the analysis show that small incremental updates are indeed effective to maintain a stable level of performance. Subsequently, we employed the same method on-line to teleoperate a humanoid robotic arm equipped with a state-of-the-art commercial prosthetic hand. The subject could reliably grasp, carry and release everyday-life objects, enforcing stable grasping irrespective of the signal changes, hand/arm movements and wrist pronation and supination.
手部假肢的稳定肌电控制仍然是一个未解决的问题。唯一成功的人机接口是表面肌电图,通常只能控制几个自由度。机器学习技术可能有潜力消除这些限制,但到目前为止,它们的性能还不够:肌电信号会随着时间的推移受到各种因素的影响而发生变化,从而降低控制性能。因此,在标准方法中,有必要定期从头开始重新训练一个新模型。在此,我们提出了一种非线性增量学习方法,该方法通过偶尔用少量新的训练数据进行更新,允许持续适应信号的变化。特别是,我们将增量岭回归与一种称为随机傅里叶特征的高斯核逼近相结合,以从肌电信号预测手指力,包括逐个手指和分组的抓握模式。我们通过首先分析其在预测单指力时的性能,证明了该方法在解决这个问题时是有效和实用的。表面肌电图和手指力是从 10 名完整受试者在两个不同日子的四个会话中收集的;分析结果表明,小的增量更新确实可以有效地保持稳定的性能水平。随后,我们在线使用相同的方法来远程操作配备最先进商业假肢的人形机器人手臂。受试者可以可靠地抓取、携带和释放日常生活用品,即使信号变化、手/臂运动以及手腕旋前和旋后,也能保持稳定的抓握。