Department of Systems Science, Faculty of Engineering Science, Osaka University Osaka, Japan.
Fujitsu Limited Kanagawa, Japan.
Front Neurosci. 2014 Jun 17;8:164. doi: 10.3389/fnins.2014.00164. eCollection 2014.
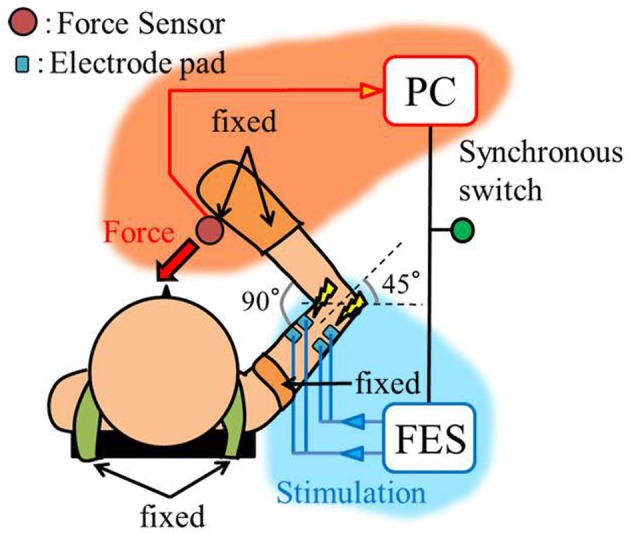
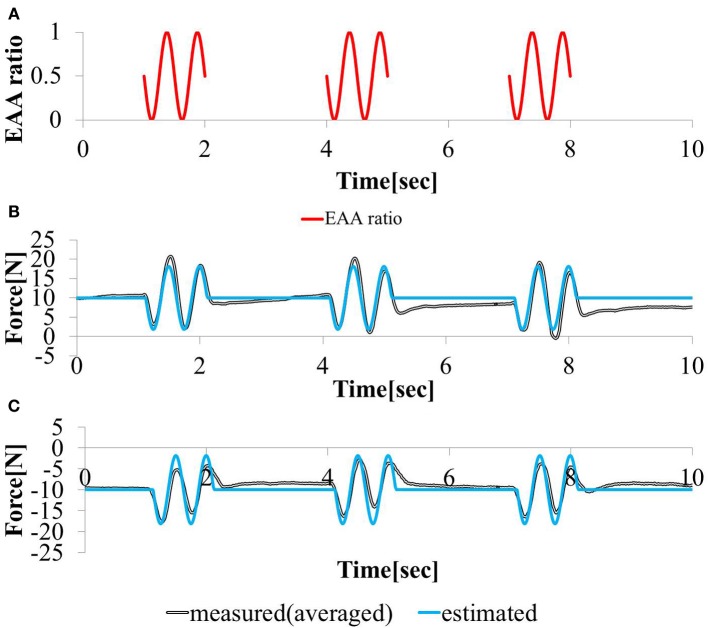
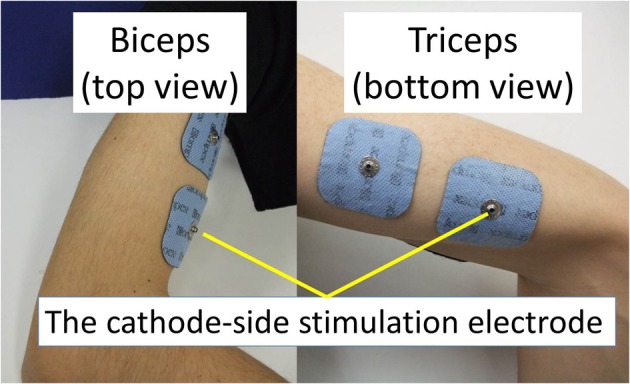
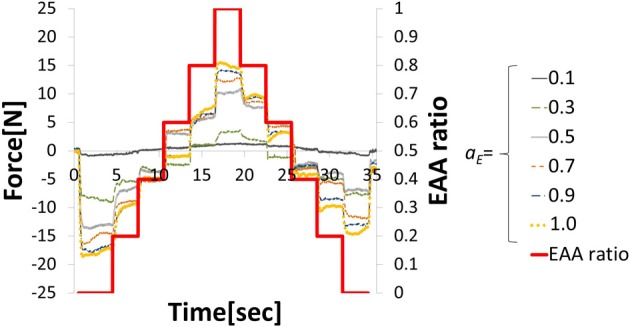
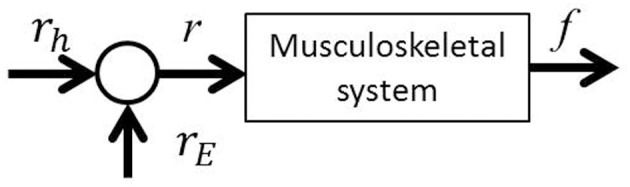
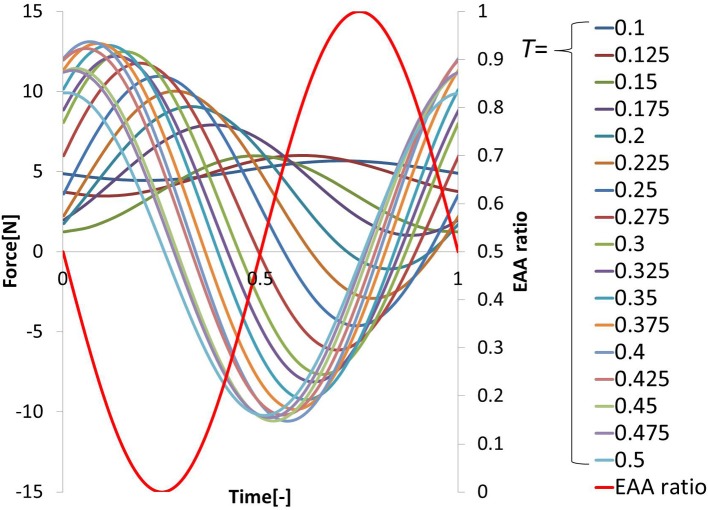
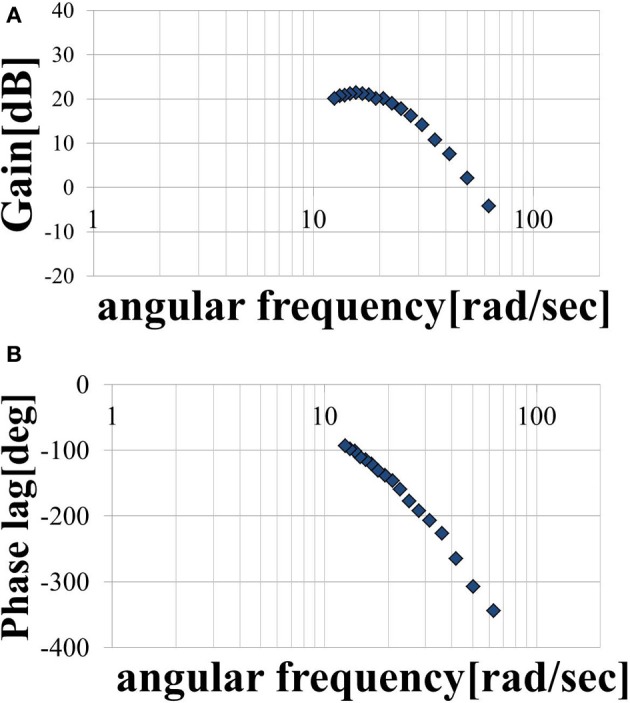
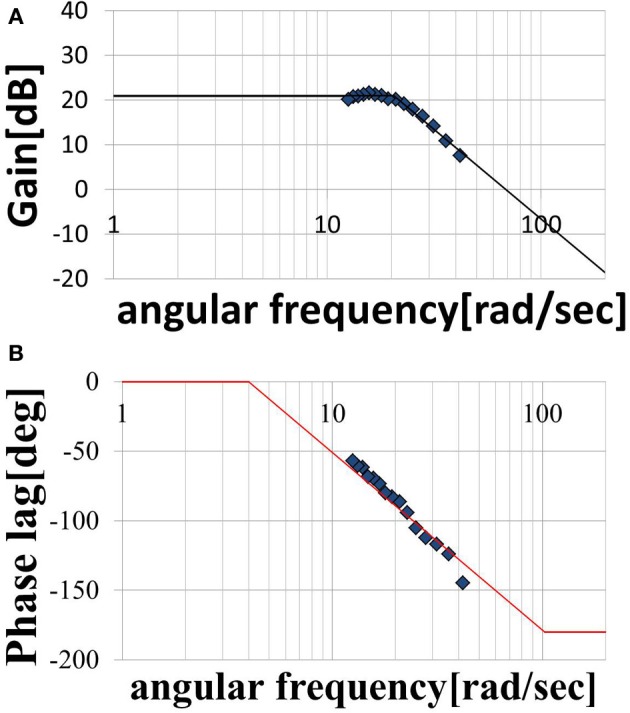
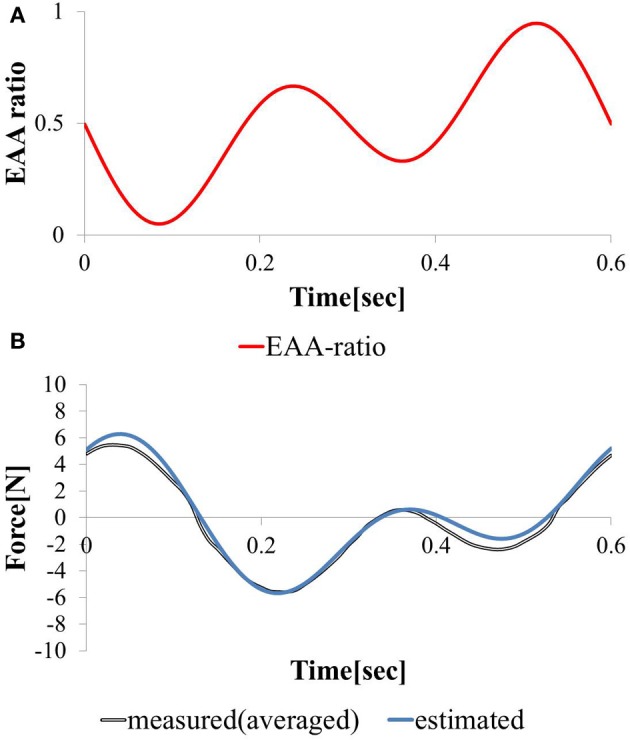
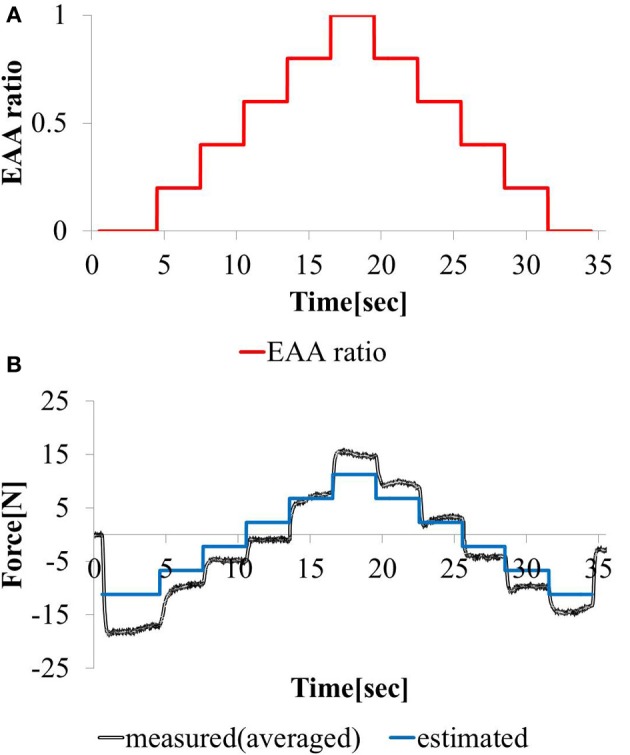
Functional electrical stimulation (FES) is considered an effective technique for aiding quadriplegic persons. However, the human musculoskeletal system has highly non-linearity and redundancy. It is thus difficult to stably and accurately control limbs using FES. In this paper, we propose a simple FES method that is consistent with the motion-control mechanism observed in humans. We focus on joint motion by a pair of agonist-antagonist muscles of the musculoskeletal system, and define the "electrical agonist-antagonist muscle ratio (EAA ratio)" and "electrical agonist-antagonist muscle activity (EAA activity)" in light of the agonist-antagonist muscle ratio and agonist-antagonist muscle activity, respectively, to extract the equilibrium point and joint stiffness from electromyography (EMG) signals. These notions, the agonist-antagonist muscle ratio and agonist-antagonist muscle activity, are based on the hypothesis that the equilibrium point and stiffness of the agonist-antagonist motion system are controlled by the central nervous system. We derived the transfer function between the input EAA ratio and force output of the end-point. We performed some experiments in an isometric environment using six subjects. This transfer-function model is expressed as a cascade-coupled dead time element and a second-order system. High-speed, high-precision, smooth control of the hand force were achieved through the agonist-antagonist muscle stimulation pattern determined by this transfer function model.
功能性电刺激(FES)被认为是辅助四肢瘫痪患者的有效技术。然而,人体肌肉骨骼系统具有高度的非线性和冗余性。因此,很难使用 FES 稳定且准确地控制四肢。在本文中,我们提出了一种与人类观察到的运动控制机制一致的简单 FES 方法。我们专注于肌肉骨骼系统的一对原动肌-拮抗肌的关节运动,并根据原动肌-拮抗肌比和原动肌-拮抗肌活动分别定义“电原动肌-拮抗肌比(EAA 比)”和“电原动肌-拮抗肌活动(EAA 活动)”,从肌电图(EMG)信号中提取平衡点和关节刚度。这些概念,即原动肌-拮抗肌比和原动肌-拮抗肌活动,基于这样一种假设,即原动肌-拮抗肌运动系统的平衡点和刚度由中枢神经系统控制。我们推导出了输入 EAA 比与端点力输出之间的传递函数。我们在等长环境中使用六个受试者进行了一些实验。通过该传递函数模型确定的原动肌-拮抗肌刺激模式,实现了对手力的高速、高精度、平滑控制。