Faculty of Health, Department of Dentistry, University of Witten/Herdecke, Alfred-Herrhausen-Str, 50, 58448 Witten, Germany.
BMC Oral Health. 2014 Jul 4;14:82. doi: 10.1186/1472-6831-14-82.
Clinical validation of laboratory toothbrushing tests has important advantages. It was, therefore, the aim to demonstrate correlation of tooth cleaning efficiency of a new robot brushing simulation technique with clinical plaque removal.
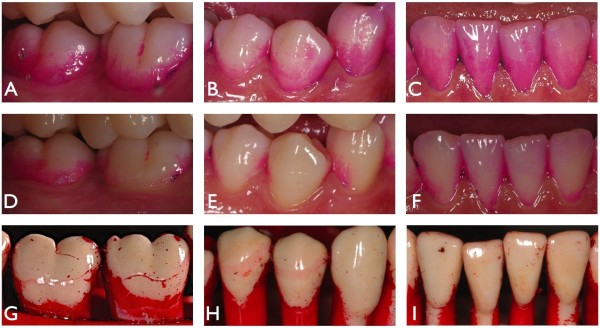
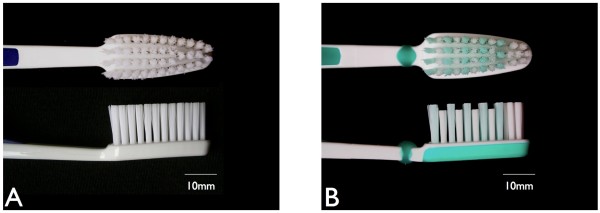
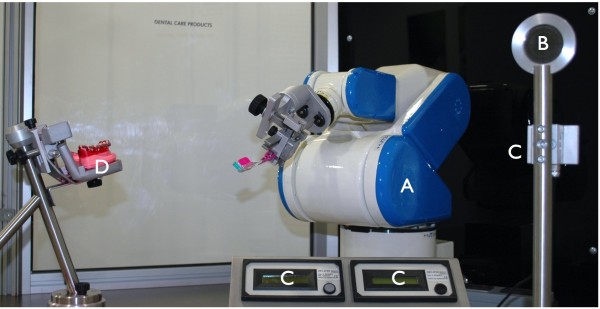
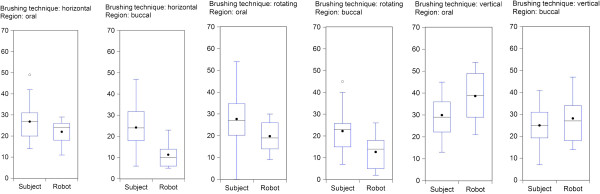
Clinical programme: 27 subjects received dental cleaning prior to 3-day-plaque-regrowth-interval. Plaque was stained, photographically documented and scored using planimetrical index. Subjects brushed teeth 33-47 with three techniques (horizontal, rotating, vertical), each for 20s buccally and for 20s orally in 3 consecutive intervals. The force was calibrated, the brushing technique was video supported. Two different brushes were randomly assigned to the subject. Robot programme: Clinical brushing programmes were transfered to a 6-axis-robot. Artificial teeth 33-47 were covered with plaque-simulating substrate. All brushing techniques were repeated 7 times, results were scored according to clinical planimetry. All data underwent statistical analysis by t-test, U-test and multivariate analysis.
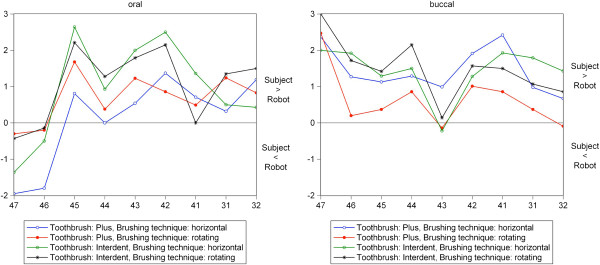
The individual clinical cleaning patterns are well reproduced by the robot programmes. Differences in plaque removal are statistically significant for the two brushes, reproduced in clinical and robot data. Multivariate analysis confirms the higher cleaning efficiency for anterior teeth and for the buccal sites.
The robot tooth brushing simulation programme showed good correlation with clinically standardized tooth brushing.This new robot brushing simulation programme can be used for rapid, reproducible laboratory testing of tooth cleaning.
临床验证实验室牙刷测试具有重要优势。因此,本研究旨在证明一种新型机器人刷牙模拟技术的牙齿清洁效率与临床牙菌斑去除之间的相关性。
临床方案:27 名受试者在 3 天牙菌斑再生长间隔期之前接受牙齿清洁。使用平面指数对菌斑进行染色、照相记录和评分。受试者使用三种技术(水平、旋转、垂直)刷牙 33-47 次,每个技术的颊侧和舌侧各刷 20 秒,连续 3 个间隔。力被校准,刷牙技术得到视频支持。将两种不同的牙刷随机分配给受试者。机器人方案:将临床刷牙方案转移到 6 轴机器人上。人工牙 33-47 覆盖有菌斑模拟底物。所有刷牙技术均重复 7 次,根据临床平面测量法进行评分。所有数据均通过 t 检验、U 检验和多元分析进行统计分析。
机器人方案可很好地再现个体临床清洁模式。两种牙刷在牙菌斑去除方面存在差异,在临床和机器人数据中均得到重现。多元分析证实了前牙和颊侧部位的清洁效率更高。
机器人牙刷模拟方案与临床标准化牙刷测试具有良好的相关性。这种新的机器人刷牙模拟方案可用于快速、可重复的牙齿清洁实验室测试。