Artificial Intelligence Laboratory, Department of Informatics, University of Zürich Zürich, Switzerland.
Centre for Robotics and Neural Systems and Cognition Institute, Plymouth University Plymouth, Devon, UK.
Front Comput Neurosci. 2014 Jun 23;8:63. doi: 10.3389/fncom.2014.00063. eCollection 2014.
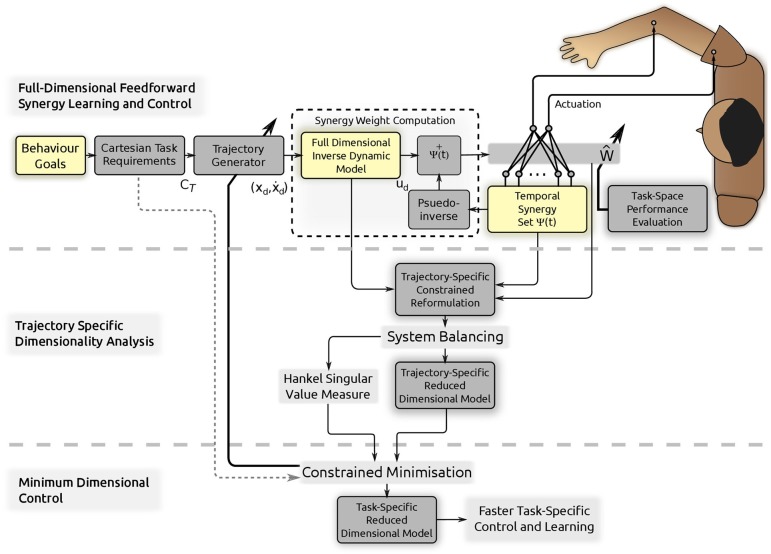
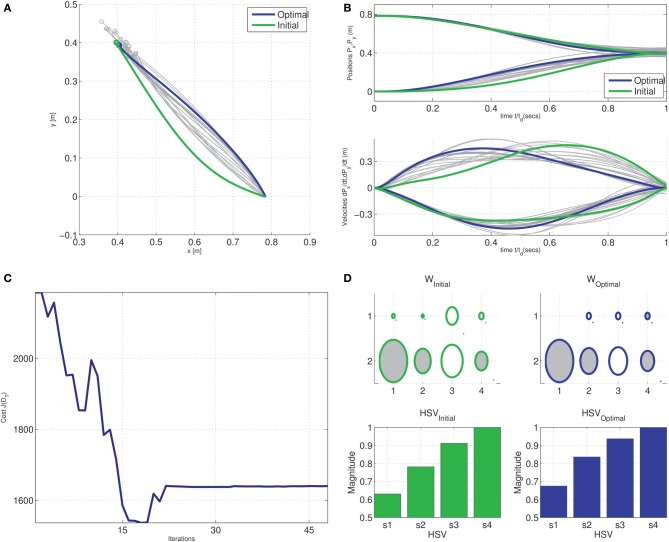
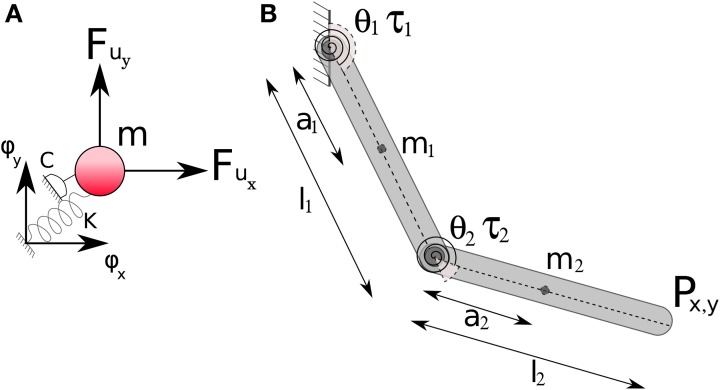
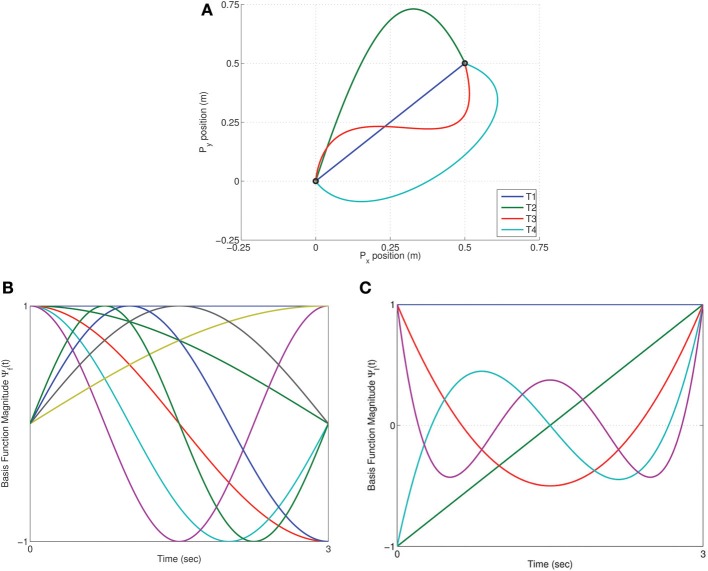
The muscle synergy hypothesis is an archetype of the notion of Dimensionality Reduction (DR) occurring in the central nervous system due to modular organization. Toward validating this hypothesis, it is important to understand if muscle synergies can reduce the state-space dimensionality while maintaining task control. In this paper we present a scheme for investigating this reduction utilizing the temporal muscle synergy formulation. Our approach is based on the observation that constraining the control input to a weighted combination of temporal muscle synergies also constrains the dynamic behavior of a system in a trajectory-specific manner. We compute this constrained reformulation of system dynamics and then use the method of system balancing for quantifying the DR; we term this approach as Trajectory Specific Dimensionality Analysis (TSDA). We then investigate the consequence of minimization of the dimensionality for a given task. These methods are tested in simulations on a linear (tethered mass) and a non-linear (compliant kinematic chain) system. Dimensionality of various reaching trajectories is compared when using idealized temporal synergies. We show that as a consequence of this Minimum Dimensional Control (MDC) model, smooth straight-line Cartesian trajectories with bell-shaped velocity profiles emerged as the optima for the reaching task. We also investigated the effect on dimensionality due to adding via-points to a trajectory. The results indicate that a trajectory and synergy basis specific DR of behavior results from muscle synergy control. The implications of these results for the synergy hypothesis, optimal motor control, motor development, and robotics are discussed.
肌肉协同假说(Muscle Synergy Hypothesis)是一种由于模块化组织而在中枢神经系统中发生的维度约简(Dimensionality Reduction,DR)的概念范例。为了验证该假说,重要的是要了解肌肉协同是否可以在保持任务控制的同时降低状态空间的维数。在本文中,我们提出了一种利用时间肌肉协同公式来研究这种约简的方案。我们的方法基于这样一种观察,即限制控制输入为时间肌肉协同的加权组合也以特定轨迹的方式约束系统的动态行为。我们计算系统动力学的这种约束重构,然后使用系统平衡方法来量化 DR;我们将这种方法称为轨迹特定维度分析(Trajectory Specific Dimensionality Analysis,TSDA)。然后,我们研究了给定任务下最小化维度的后果。这些方法在一个线性(系绳质量)和一个非线性(顺应运动链)系统的模拟中进行了测试。当使用理想化的时间协同时,比较了各种到达轨迹的维数。我们表明,作为这种最小维度控制(Minimum Dimensional Control,MDC)模型的结果,具有钟形速度轮廓的平滑直线笛卡尔轨迹作为到达任务的最优轨迹出现。我们还研究了在轨迹中添加中间点对维度的影响。结果表明,来自肌肉协同控制的轨迹和协同基特定的行为 DR。讨论了这些结果对协同假说、最佳运动控制、运动发展和机器人学的意义。