Reynolds Raymond F, Osler Callum J
School of Sport, Exercise and Rehabilitation Sciences, University of Birmingham, Birmingham B15 2TT, UK
Department of Life Sciences, University of Derby, Kedleston Road, Derby DE22 1GB, UK.
J R Soc Interface. 2014 Dec 6;11(101):20140751. doi: 10.1098/rsif.2014.0751.
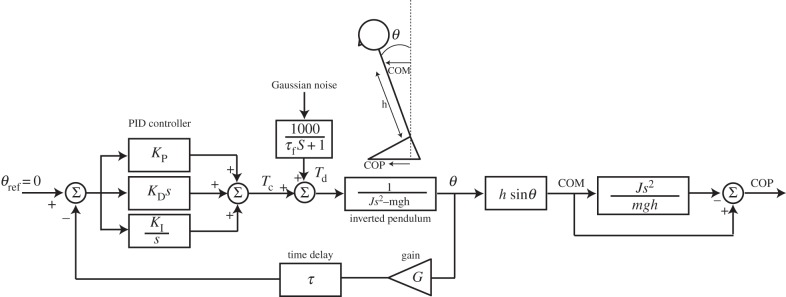
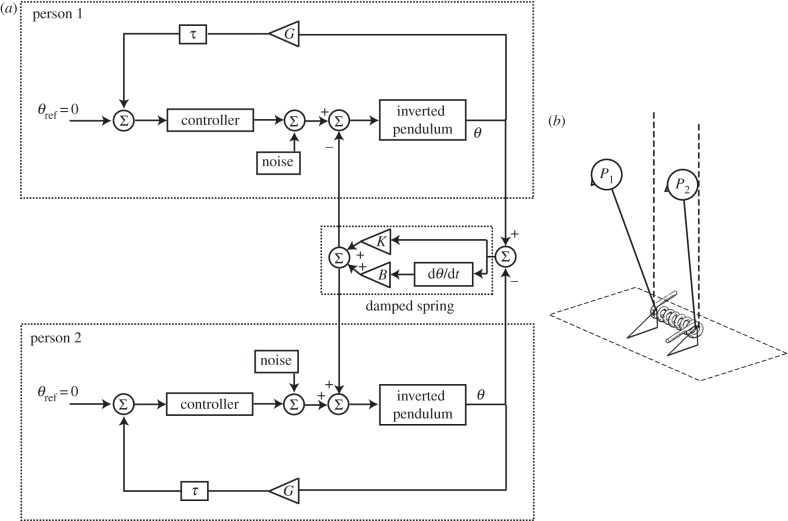
Here we explain the neural and mechanical mechanisms responsible for synchronizing sway and improving postural control during physical contact with another standing person. Postural control processes were modelled using an inverted pendulum under continuous feedback control. Interpersonal interactions were simulated either by coupling the sensory feedback loops or by physically coupling the pendulums with a damped spring. These simulations precisely recreated the timing and magnitude of sway interactions observed empirically. Effects of firmly grasping another person's shoulder were explained entirely by the mechanical linkage. This contrasted with light touch and/or visual contact, which were explained by a sensory weighting phenomenon; each person's estimate of upright was based on a weighted combination of veridical sensory feedback combined with a small contribution from their partner. Under these circumstances, the model predicted reductions in sway even without the need to distinguish between self and partner motion. Our findings explain the seemingly paradoxical observation that touching a swaying person can improve postural control.
在此,我们解释在与另一个站立的人进行身体接触时,负责使摇摆同步并改善姿势控制的神经和机械机制。姿势控制过程采用连续反馈控制下的倒立摆模型进行模拟。人际互动通过耦合感觉反馈回路或通过用阻尼弹簧物理耦合摆锤来模拟。这些模拟精确地再现了凭经验观察到的摇摆相互作用的时间和幅度。紧紧抓住另一个人的肩膀所产生的效果完全由机械联系来解释。这与轻触和/或视觉接触形成对比,后者由感觉加权现象来解释;每个人对直立的估计基于真实感觉反馈的加权组合以及来自其伙伴的少量贡献。在这些情况下,该模型预测即使无需区分自我和伙伴的运动,摇摆也会减少。我们的研究结果解释了看似矛盾的观察结果,即触摸一个摇摆的人可以改善姿势控制。