Zhou Tao, Zhang Lei, Latash Mark L
a Department of Kinesiology , The Pennsylvania State University , University Park.
J Mot Behav. 2015;47(4):352-61. doi: 10.1080/00222895.2014.986045. Epub 2015 Jan 7.
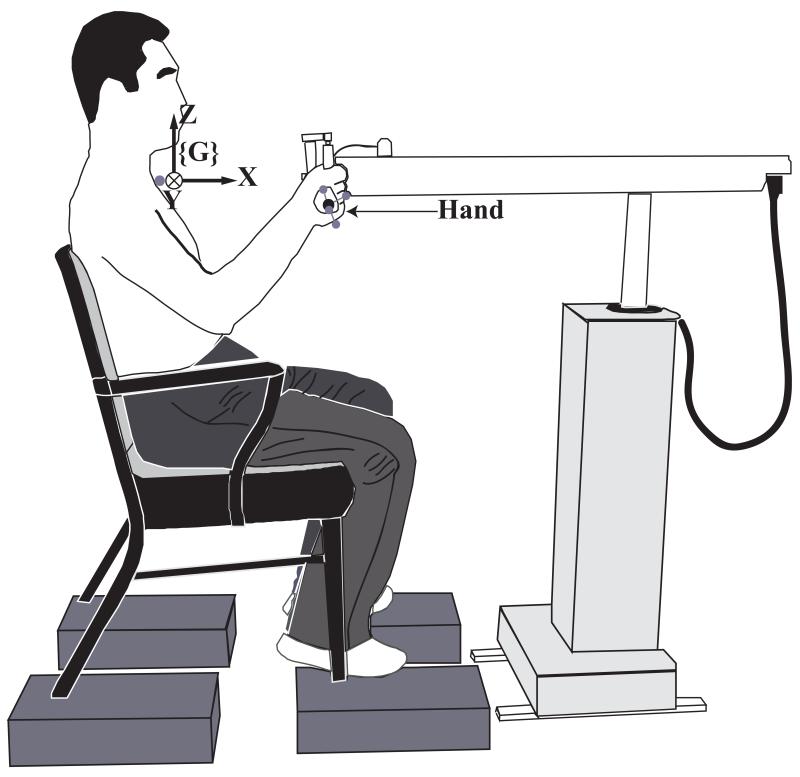
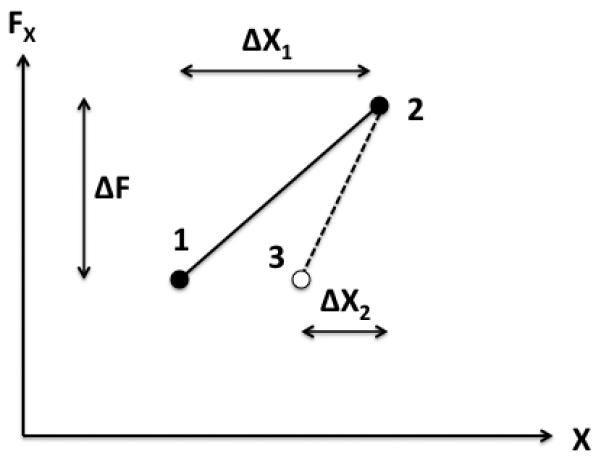
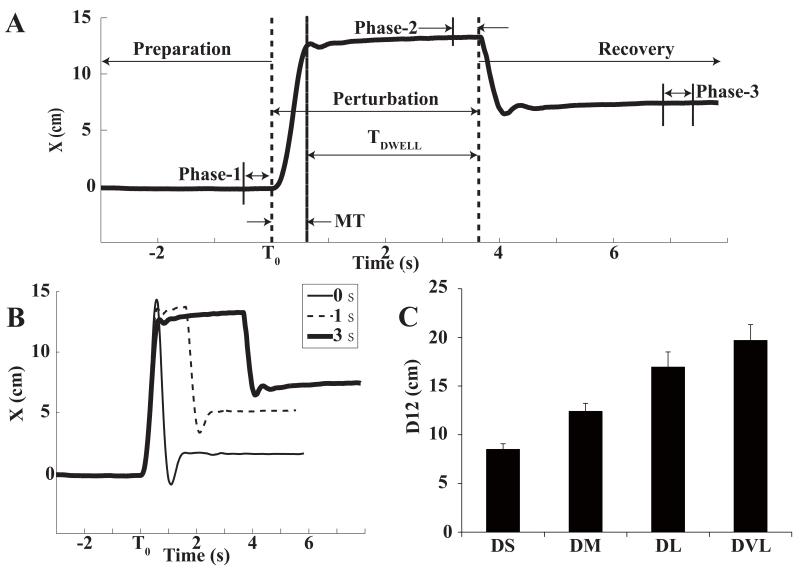
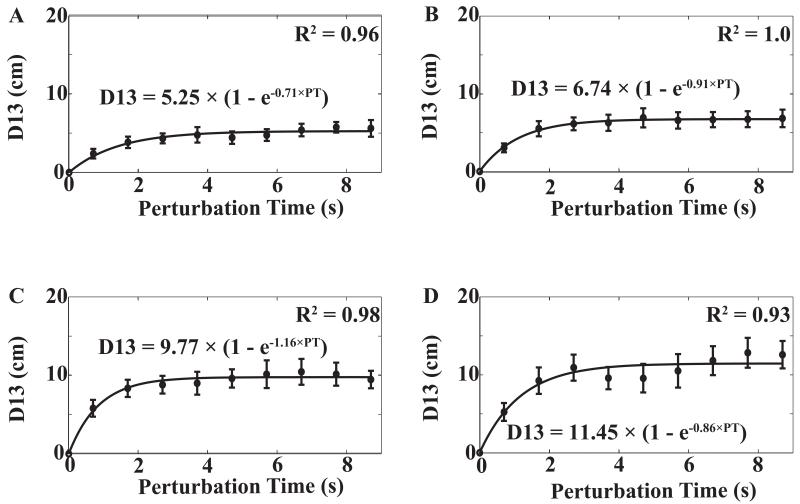
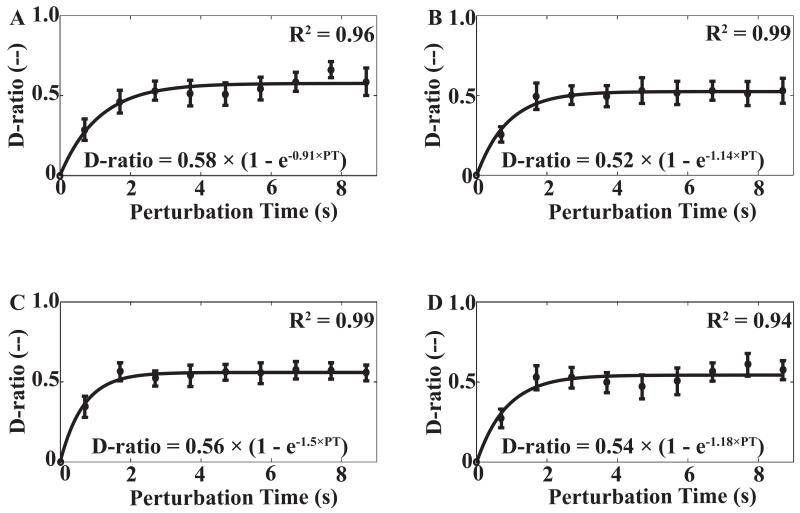
The authors explored the phenomenon of unintentional changes in the equilibrium state of a multijoint effector produced by transient changes in the external force. The subjects performed a position-holding task against a constant force produced by a robot and were instructed not to intervene voluntarily with movements produced by changes in the robot force. The robot produced a smooth force increase leading to a hand movement, followed by a dwell time. Then, the force dropped to its initial value leading to hand movement toward the initial position, but the hand stopped short of the initial position. The undershoot magnitude increased linearly with the peak hand displacement and exponentially with dwell time (time constant of about 1 s). For long dwell times, the hand stopped at about half the total distance to the initial position. The authors interpret the results as consequences of a drift of the referent hand coordinate. Our results provide support for back-coupling between the referent and actual body configurations during multijoint actions and produce the first quantitative analysis of this phenomenon. This mechanism can also explain the phenomena of slacking and force drop after turning visual feedback off during accurate force production task.
作者探究了由外力瞬态变化引起的多关节效应器平衡状态的无意变化现象。受试者在对抗机器人产生的恒定力的情况下执行位置保持任务,并被指示不要主动干预因机器人力量变化而产生的运动。机器人产生平稳的力增加,导致手部移动,随后是一段停留时间。然后,力降至其初始值,导致手部向初始位置移动,但手部在到达初始位置之前就停止了。下冲幅度随手部峰值位移呈线性增加,随停留时间呈指数增加(时间常数约为1秒)。对于较长的停留时间,手部在距初始位置总距离的大约一半处停止。作者将这些结果解释为参考手部坐标漂移的结果。我们的结果为多关节动作期间参考身体构型与实际身体构型之间的反向耦合提供了支持,并首次对这一现象进行了定量分析。这种机制还可以解释在精确力产生任务中关闭视觉反馈后出现的松弛和力下降现象。