Hamlin Marvin, Traughber Terence, Reinkensmeyer David J, de Leon Ray D
School of Kinesiology and Nutritional Science, California State University, 5151 State University Dr, LA, Los Angeles, CA, 90032, USA.
Department of Mechanical and Aerospace Engineering, University of California, 4200 Engineering Gateway, Irvine, CA, 92697-3875, USA.
J Neurosci Methods. 2015 May 15;246:134-41. doi: 10.1016/j.jneumeth.2015.03.015. Epub 2015 Mar 18.
Providing weight support facilitates locomotion in spinal cord injured animals. To control weight support, robotic systems have been developed for treadmill stepping and more recently for overground walking.
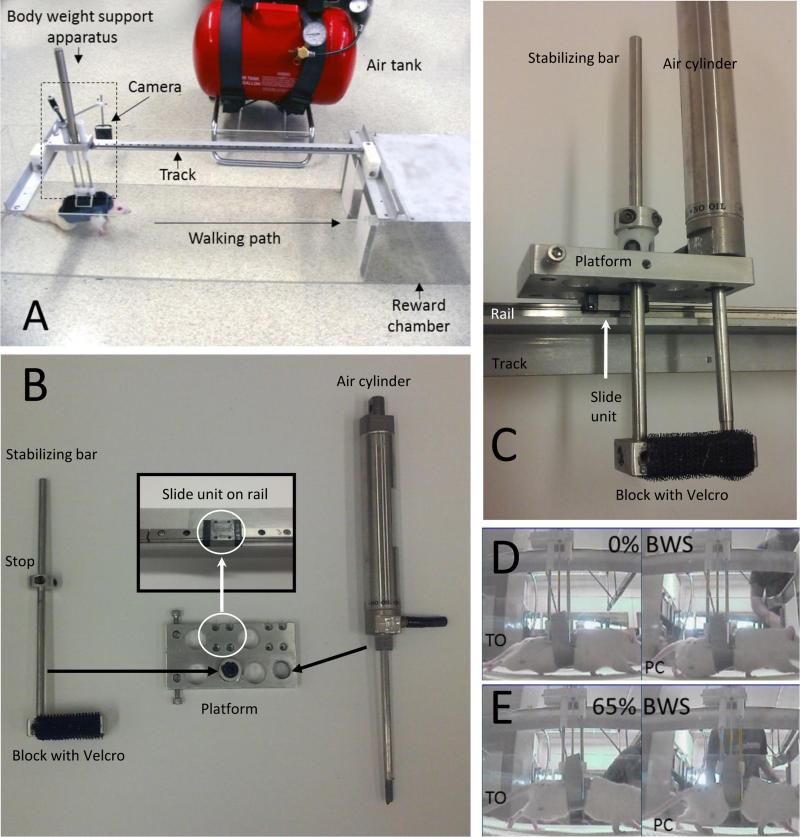
We developed a novel device, the body weight supported ambulatory rodent trainer (i.e. BART). It has a small pneumatic cylinder that moves along a linear track above the rat. When air is supplied to the cylinder, the rats are lifted as they perform overground walking. We tested the BART device in rats that received a moderate spinal cord contusion injury and in normal rats. Locomotor training with the BART device was not performed.
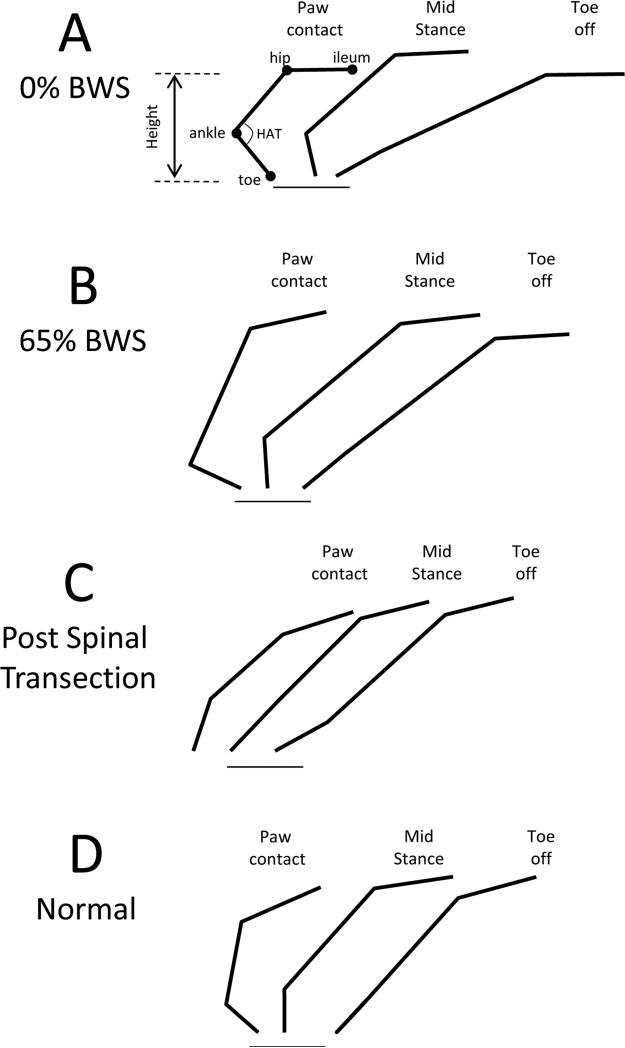
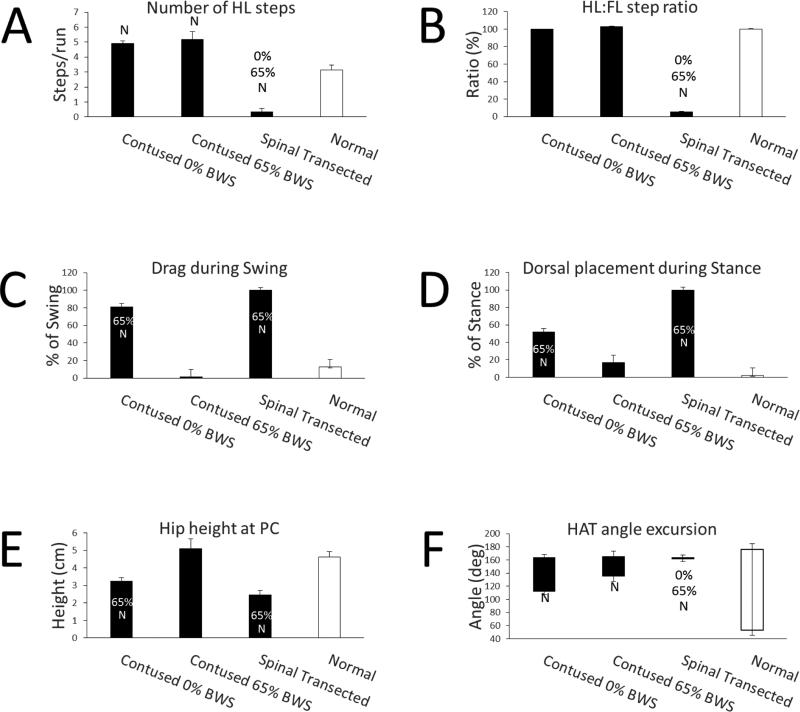
All of the rats learned to walk in the BART device. In the contused rats, significantly greater paw dragging and dorsal stepping occurred in the hindlimbs compared to normal. Providing weight support significantly raised hip position and significantly reduced locomotor deficits. Hindlimb stepping was tightly coupled to forelimb stepping but only when the contused rats stepped without weight support. Three weeks after the contused rats received a complete spinal cord transection, significantly fewer hindlimb steps were performed.
Relative to rodent robotic systems, the BART device is a simpler system for studying overground locomotion. The BART device lacks sophisticated control and sensing capability, but it can be assembled relatively easily and cheaply.
These findings suggest that the BART device is a useful tool for assessing quadrupedal, overground locomotion which is a more natural form of locomotion relative to treadmill locomotion.
提供体重支持有助于脊髓损伤动物的运动。为了控制体重支持,已经开发了用于跑步机行走的机器人系统,最近还用于地面行走。
我们开发了一种新型装置,即体重支持式动态啮齿动物训练器(即BART)。它有一个小气缸,可在大鼠上方沿直线轨道移动。当向气缸供气时,大鼠在进行地面行走时会被抬起。我们在中度脊髓挫伤损伤的大鼠和正常大鼠中测试了BART装置。未使用BART装置进行运动训练。
所有大鼠都学会了在BART装置中行走。与正常大鼠相比,挫伤大鼠的后肢明显出现更多的爪拖曳和背侧步。提供体重支持显著提高了臀部位置,并显著减少了运动缺陷。后肢步与前肢步紧密耦合,但仅在挫伤大鼠无体重支持的情况下行走时才会如此。挫伤大鼠接受完全脊髓横断三周后,后肢步显著减少。
相对于啮齿动物机器人系统,BART装置是一种用于研究地面运动的更简单系统。BART装置缺乏复杂的控制和传感能力,但可以相对容易且廉价地组装。
这些发现表明,BART装置是评估四足动物地面运动的有用工具,相对于跑步机运动而言,这是一种更自然的运动形式。