Malcolm Philippe, Quesada Roberto E, Caputo Joshua M, Collins Steven H
Department of Movement and Sports Sciences, Ghent University, Ghent, Belgium.
Department of Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, USA.
J Neuroeng Rehabil. 2015 Feb 22;12:21. doi: 10.1186/s12984-015-0014-8.
Robotic ankle-foot prostheses that provide net positive push-off work can reduce the metabolic rate of walking for individuals with amputation, but benefits might be sensitive to push-off timing. Simple walking models suggest that preemptive push-off reduces center-of-mass work, possibly reducing metabolic rate. Studies with bilateral exoskeletons have found that push-off beginning before leading leg contact minimizes metabolic rate, but timing was not varied independently from push-off work, and the effects of push-off timing on biomechanics were not measured. Most lower-limb amputations are unilateral, which could also affect optimal timing. The goal of this study was to vary the timing of positive prosthesis push-off work in isolation and measure the effects on energetics, mechanics and muscle activity.
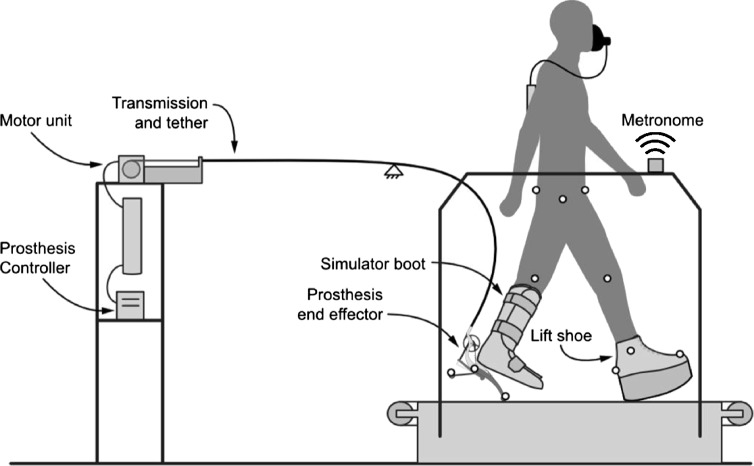
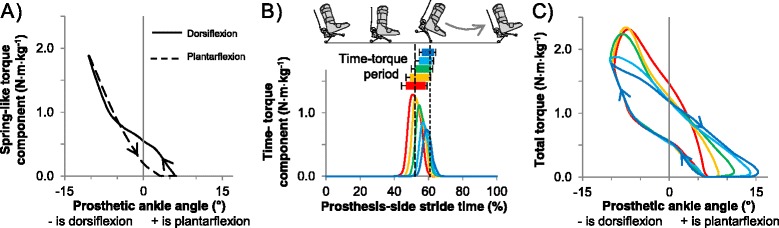
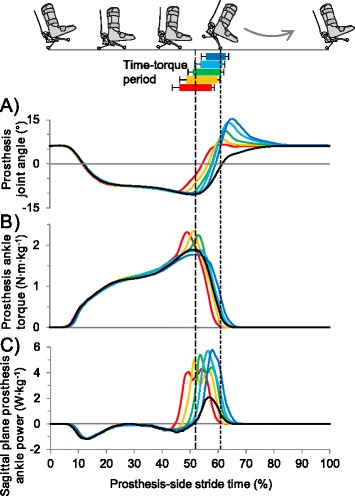
We tested 10 able-bodied participants walking on a treadmill at 1.25 m · s(-1). Participants wore a tethered ankle-foot prosthesis emulator on one leg using a rigid boot adapter. We programmed the prosthesis to apply torque bursts that began between 46% and 56% of stride in different conditions. We iteratively adjusted torque magnitude to maintain constant net positive push-off work.
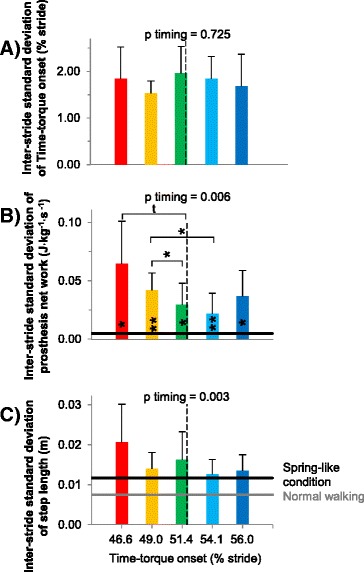
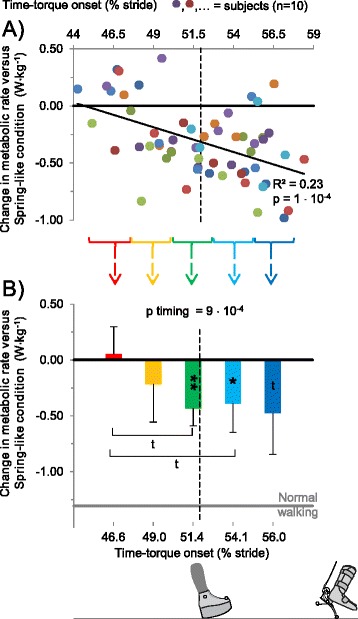
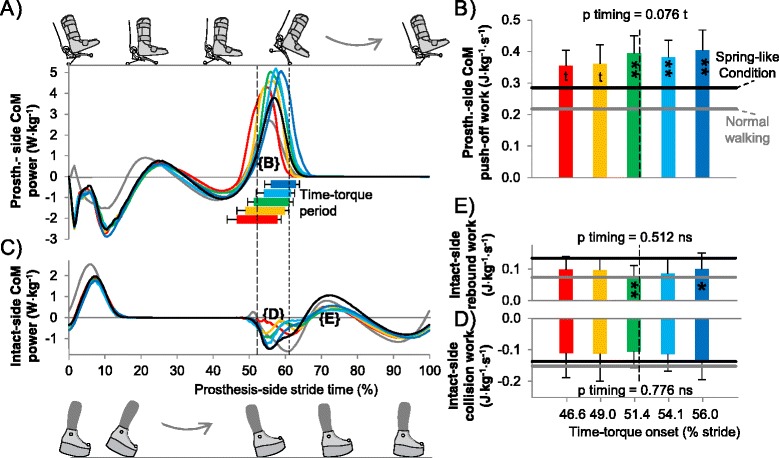
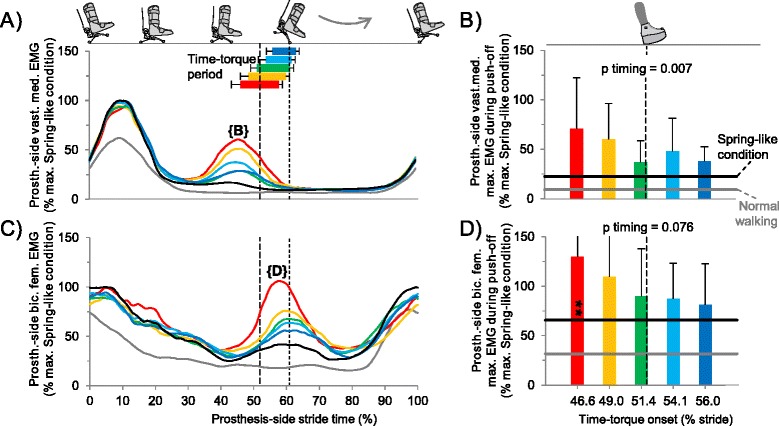
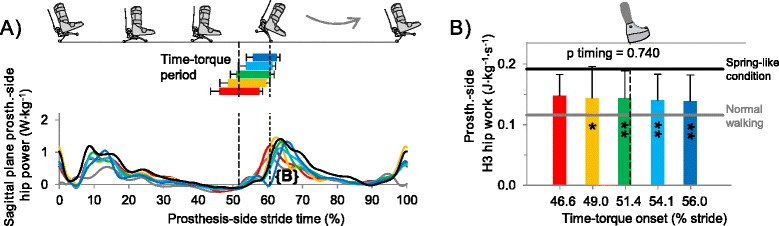
When push-off began at or after leading leg contact, metabolic rate was about 10% lower than in a condition with Spring-like prosthesis behavior. When push-off began before leading leg contact, metabolic rate was not different from the Spring-like condition. Early push-off led to increased prosthesis-side vastus medialis and biceps femoris activity during push-off and increased variability in step length and prosthesis loading during push-off. Prosthesis push-off timing had no influence on intact-side leg center-of-mass collision work.
Prosthesis push-off timing, isolated from push-off work, strongly affected metabolic rate, with optimal timing at or after intact-side heel contact. Increased thigh muscle activation and increased human variability appear to have caused the lack of reduction in metabolic rate when push-off was provided too early. Optimal timing with respect to opposite heel contact was not different from normal walking, but the trends in metabolic rate and center-of-mass mechanics were not consistent with simple model predictions. Optimal push-off timing should also be characterized for individuals with amputation, since meaningful benefits might be realized with improved timing.
能够提供净正蹬离功的机器人踝足假肢可以降低截肢者行走时的代谢率,但益处可能对蹬离时机敏感。简单的行走模型表明,提前蹬离可减少质心做功,可能降低代谢率。对双侧外骨骼的研究发现,在领先腿接触前开始蹬离可使代谢率降至最低,但蹬离时机并非独立于蹬离功而变化,且未测量蹬离时机对生物力学的影响。大多数下肢截肢是单侧的,这也可能影响最佳时机。本研究的目的是单独改变假肢正蹬离功的时机,并测量其对能量学、力学和肌肉活动的影响。
我们测试了10名健康参与者在跑步机上以1.25 m·s⁻¹的速度行走。参与者使用刚性靴适配器在一条腿上佩戴了系绳式踝足假肢模拟器。我们对假肢进行编程,使其在不同条件下在步幅的46%至56%之间开始施加扭矩脉冲。我们迭代调整扭矩大小以维持恒定的净正蹬离功。
当蹬离在领先腿接触时或之后开始时,代谢率比类似弹簧假肢行为的情况下低约10%。当蹬离在领先腿接触前开始时,代谢率与类似弹簧的情况没有差异。提前蹬离导致蹬离期间假肢侧股内侧肌和股二头肌活动增加,以及蹬离期间步长和假肢负荷的变异性增加。假肢蹬离时机对健侧腿质心碰撞功没有影响。
与蹬离功无关的假肢蹬离时机对代谢率有强烈影响,最佳时机是在健侧足跟接触时或之后。当蹬离过早时,大腿肌肉激活增加和人体变异性增加似乎导致了代谢率没有降低。相对于对侧足跟接触的最佳时机与正常行走没有差异,但代谢率和质心力学的趋势与简单模型预测不一致。对于截肢者也应确定最佳蹬离时机,因为改善时机可能会带来有意义的益处。