Takahashi Kota Z, Lewek Michael D, Sawicki Gregory S
Joint Department of Biomedical Engineering, North Carolina State University and University of North Carolina at Chapel Hill, 911 Oval Drive, Campus Box 7115, Raleigh, NC, 27695, USA.
Division of Physical Therapy, Department of Allied Health Sciences, University of North Carolina at Chapel Hill, Bondurant Hall, 321 South Columbia St, Campus Box 7135, Chapel Hill, NC, 27599, USA.
J Neuroeng Rehabil. 2015 Feb 25;12:23. doi: 10.1186/s12984-015-0015-7.
In persons post-stroke, diminished ankle joint function can contribute to inadequate gait propulsion. To target paretic ankle impairments, we developed a neuromechanics-based powered ankle exoskeleton. Specifically, this exoskeleton supplies plantarflexion assistance that is proportional to the user's paretic soleus electromyography (EMG) amplitude only during a phase of gait when the stance limb is subjected to an anteriorly directed ground reaction force (GRF). The purpose of this feasibility study was to examine the short-term effects of the powered ankle exoskeleton on the mechanics and energetics of gait.
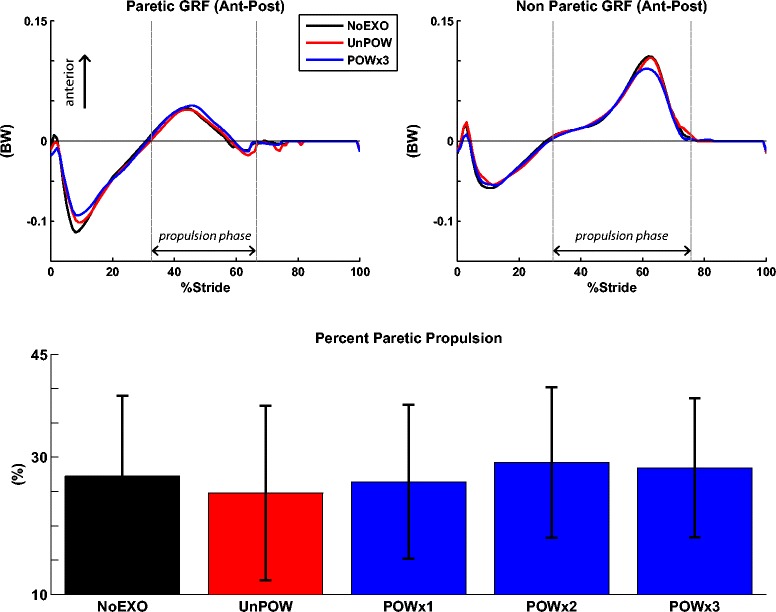
Five subjects with stroke walked with a powered ankle exoskeleton on the paretic limb for three 5 minute sessions. We analyzed the peak paretic ankle plantarflexion moment, paretic ankle positive work, symmetry of GRF propulsion impulse, and net metabolic power.
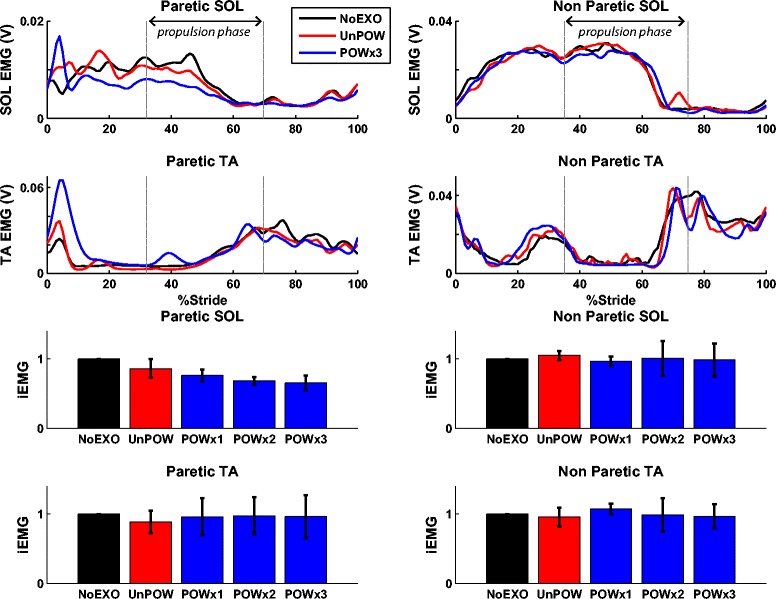
The exoskeleton increased the paretic plantarflexion moment by 16% during the powered walking trials relative to unassisted walking condition (p < .05). Despite this enhanced paretic ankle moment, there was no significant increase in paretic ankle positive work, or changes in any other mechanical variables with the powered assistance. The exoskeleton assistance appeared to reduce the net metabolic power gradually with each 5 minute repetition, though no statistical significance was found. In three of the subjects, the paretic soleus activation during the propulsion phase of stance was reduced during the powered assistance compared to unassisted walking (35% reduction in the integrated EMG amplitude during the third powered session).
This feasibility study demonstrated that the exoskeleton can enhance paretic ankle moment. Future studies with greater sample size and prolonged sessions are warranted to evaluate the effects of the powered ankle exoskeleton on overall gait outcomes in persons post-stroke.
在中风患者中,踝关节功能减退会导致步态推进不足。为了针对患侧踝关节损伤,我们开发了一种基于神经力学的动力踝关节外骨骼。具体而言,这种外骨骼仅在步态的一个阶段提供与使用者患侧比目鱼肌肌电图(EMG)幅度成比例的跖屈辅助,此时支撑腿受到向前的地面反作用力(GRF)。这项可行性研究的目的是检验动力踝关节外骨骼对步态力学和能量学的短期影响。
五名中风患者在患侧肢体上穿戴动力踝关节外骨骼行走,共进行三个5分钟的时段。我们分析了患侧踝关节最大跖屈力矩、患侧踝关节正功、GRF推进冲量的对称性以及净代谢功率。
与无辅助行走状态相比,在动力行走试验期间,外骨骼使患侧跖屈力矩增加了16%(p < 0.05)。尽管患侧踝关节力矩有所增强,但患侧踝关节正功没有显著增加,并且在动力辅助下任何其他力学变量也没有变化。外骨骼辅助似乎随着每5分钟的重复逐渐降低净代谢功率,尽管未发现统计学意义。在三名受试者中,与无辅助行走相比,在动力辅助期间站立推进阶段患侧比目鱼肌的激活减少(在第三次动力时段期间,积分EMG幅度降低了35%)。
这项可行性研究表明,外骨骼可以增强患侧踝关节力矩。未来有必要进行更大样本量和更长时段的研究,以评估动力踝关节外骨骼对中风患者整体步态结果的影响。