Handford Matthew L, Srinivasan Manoj
Mechanical and Aerospace Engineering, The Ohio State University, Columbus, USA.
Sci Rep. 2016 Feb 9;6:19983. doi: 10.1038/srep19983.
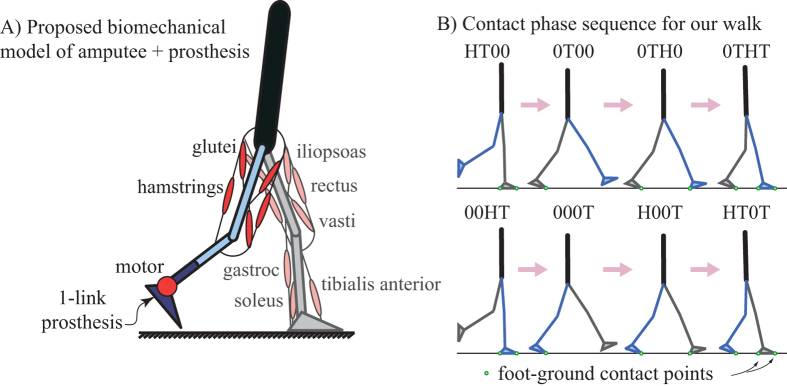
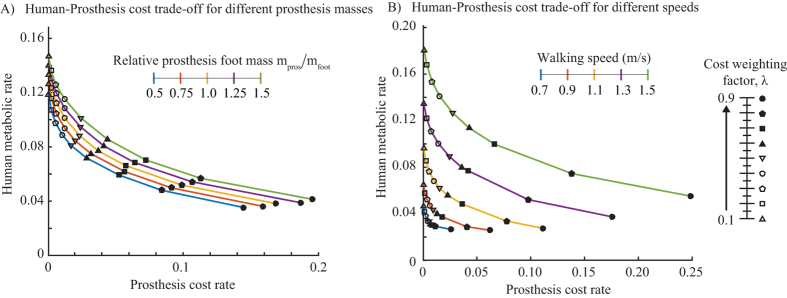
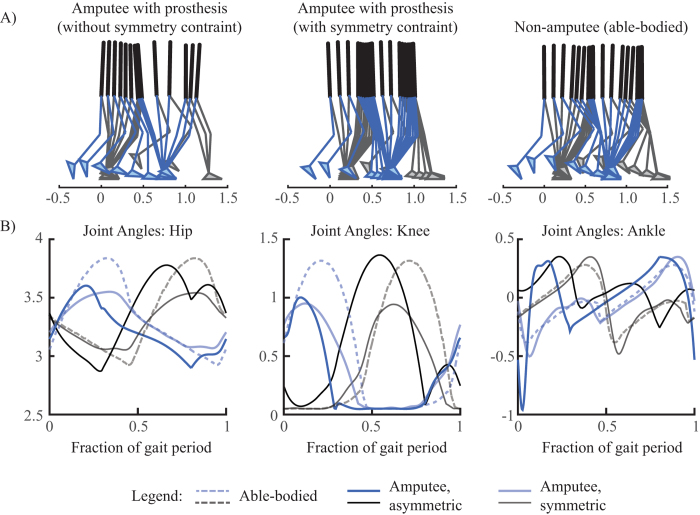
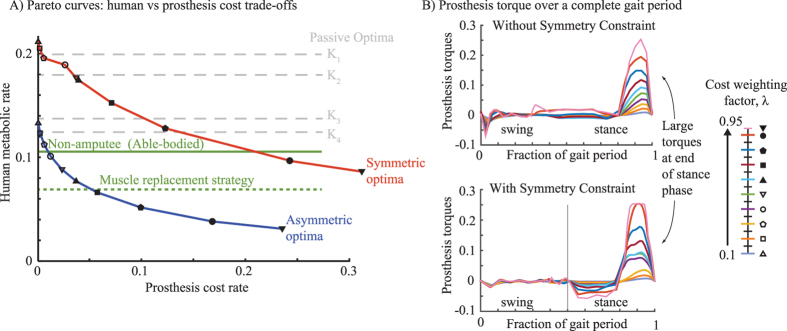
Robotic lower limb prostheses can improve the quality of life for amputees. Development of such devices, currently dominated by long prototyping periods, could be sped up by predictive simulations. In contrast to some amputee simulations which track experimentally determined non-amputee walking kinematics, here, we explicitly model the human-prosthesis interaction to produce a prediction of the user's walking kinematics. We obtain simulations of an amputee using an ankle-foot prosthesis by simultaneously optimizing human movements and prosthesis actuation, minimizing a weighted sum of human metabolic and prosthesis costs. The resulting Pareto optimal solutions predict that increasing prosthesis energy cost, decreasing prosthesis mass, and allowing asymmetric gaits all decrease human metabolic rate for a given speed and alter human kinematics. The metabolic rates increase monotonically with speed. Remarkably, by performing an analogous optimization for a non-amputee human, we predict that an amputee walking with an appropriately optimized robotic prosthesis can have a lower metabolic cost--even lower than assuming that the non-amputee's ankle torques are cost-free.
机器人下肢假肢可以提高截肢者的生活质量。此类设备的开发目前受制于较长的原型制作周期,而预测性模拟可以加快开发进程。与一些追踪通过实验确定的非截肢者行走运动学的截肢者模拟不同,在此我们明确对人体与假肢的相互作用进行建模,以预测用户的行走运动学。我们通过同时优化人体运动和假肢驱动,最小化人体代谢和假肢成本的加权总和,来获得使用踝足假肢的截肢者的模拟结果。所得的帕累托最优解预测,在给定速度下,增加假肢能量成本、减轻假肢质量以及允许不对称步态都会降低人体代谢率并改变人体运动学。代谢率随速度单调增加。值得注意的是,通过对非截肢者进行类似的优化,我们预测使用经过适当优化的机器人假肢行走的截肢者可以有更低的代谢成本——甚至比假设非截肢者的踝关节扭矩无成本时还要低。