Mechanical and Aerospace Engineering, The Ohio State University, Columbus, OH 43210.
Feinberg School of Medicine, Northwestern University, Chicago, IL 60611.
Proc Natl Acad Sci U S A. 2021 Jul 20;118(29). doi: 10.1073/pnas.2020327118.
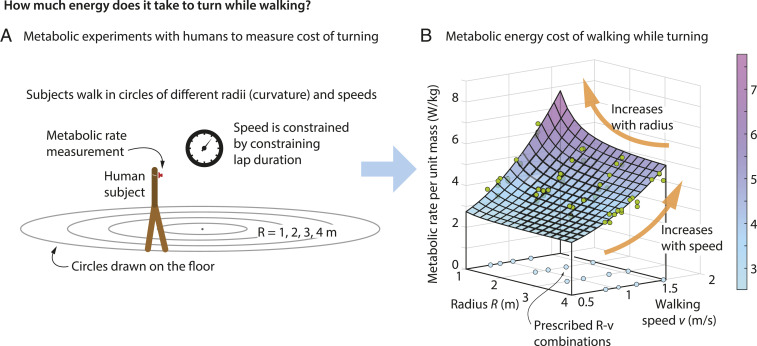
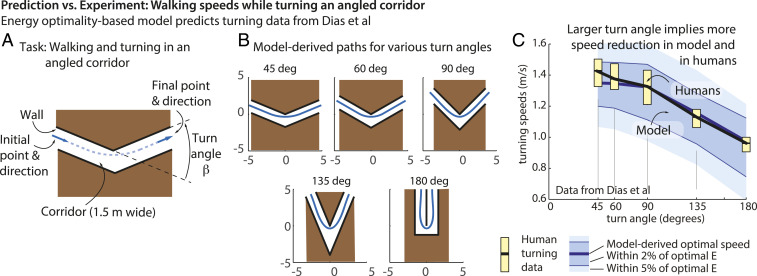
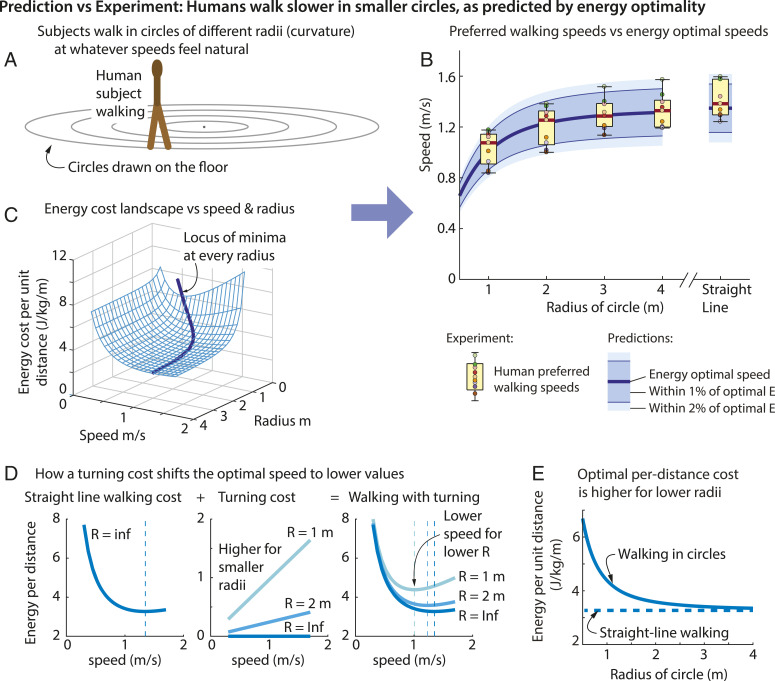
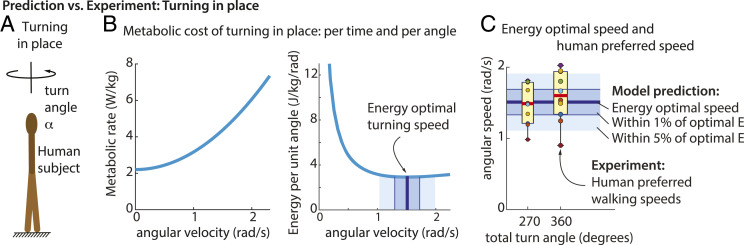
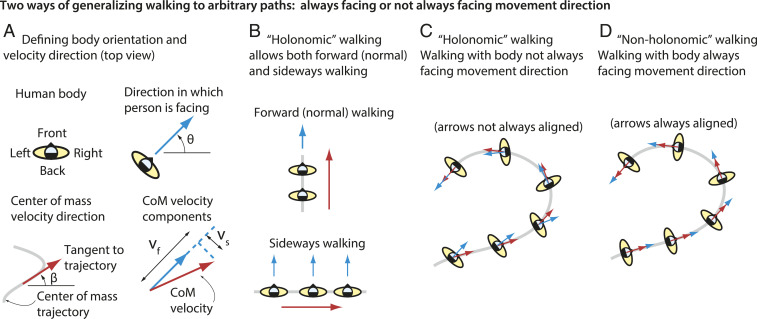
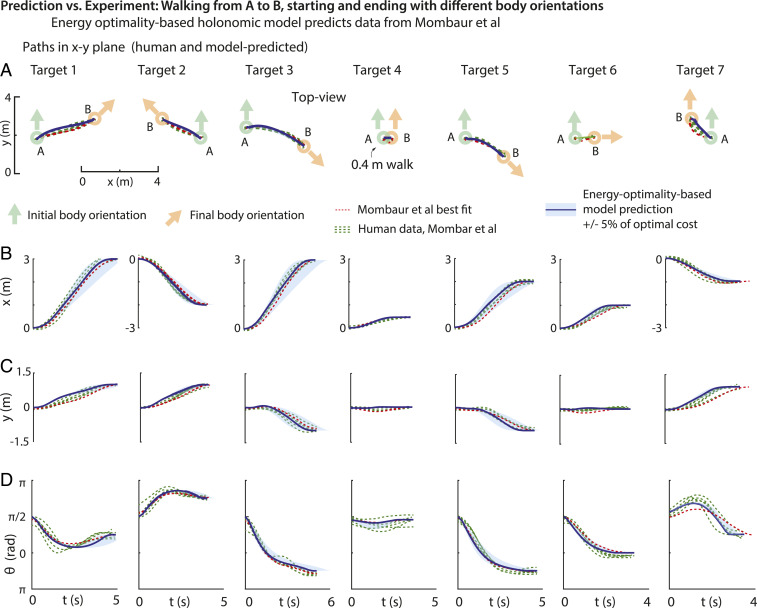
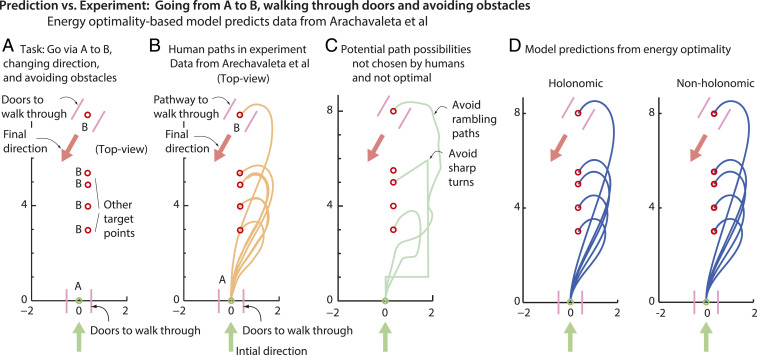
Navigating our physical environment requires changing directions and turning. Despite its ecological importance, we do not have a unified theoretical account of non-straight-line human movement. Here, we present a unified optimality criterion that predicts disparate non-straight-line walking phenomena, with straight-line walking as a special case. We first characterized the metabolic cost of turning, deriving the cost landscape as a function of turning radius and rate. We then generalized this cost landscape to arbitrarily complex trajectories, allowing the velocity direction to deviate from body orientation (holonomic walking). We used this generalized optimality criterion to mathematically predict movement patterns in multiple contexts of varying complexity: walking on prescribed paths, turning in place, navigating an angled corridor, navigating freely with end-point constraints, walking through doors, and navigating around obstacles. In these tasks, humans moved at speeds and paths predicted by our optimality criterion, slowing down to turn and never using sharp turns. We show that the shortest path between two points is, counterintuitively, often not energy-optimal, and, indeed, humans do not use the shortest path in such cases. Thus, we have obtained a unified theoretical account that predicts human walking paths and speeds in diverse contexts. Our model focuses on walking in healthy adults; future work could generalize this model to other human populations, other animals, and other locomotor tasks.
在我们的日常生活中,经常需要改变方向和转弯。尽管转弯在生态中具有重要意义,但我们并没有一个统一的理论来解释人类的非直线运动。在这里,我们提出了一个统一的最优准则,可以预测各种非直线行走现象,而直线行走则是一个特例。我们首先描述了转弯的代谢成本,将成本景观表示为转弯半径和速率的函数。然后,我们将这个成本景观推广到任意复杂的轨迹,允许速度方向偏离身体方向(完整行走)。我们使用这个广义最优准则来数学预测在不同复杂程度的多种情境下的运动模式:在规定的路径上行走、原地转弯、在有角度的走廊中导航、在有端点限制的情况下自由导航、穿过门、以及绕过障碍物。在这些任务中,人类以我们最优准则预测的速度和路径移动,在转弯时减速,并且从不使用急转弯。我们表明,两点之间最短的路径往往不是能量最优的,实际上,人类在这种情况下并不使用最短路径。因此,我们得到了一个统一的理论解释,可以预测人类在不同情境下的行走路径和速度。我们的模型专注于健康成年人的行走;未来的工作可以将这个模型推广到其他人群、其他动物和其他运动任务。