Sumida Iori, Shiomi Hiroya, Higashinaka Naokazu, Murashima Yoshikazu, Miyamoto Youichi, Yamazaki Hideya, Mabuchi Nobuhisa, Tsuda Eimei, Ogawa Kazuhiko
Osaka University Graduate School of Medicine; CyberKnife Center.
J Appl Clin Med Phys. 2016 Mar 8;17(2):74-84. doi: 10.1120/jacmp.v17i2.5914.
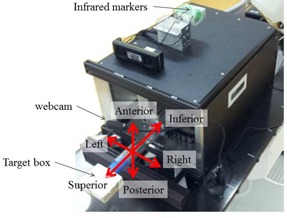
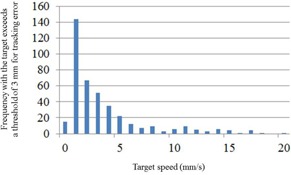
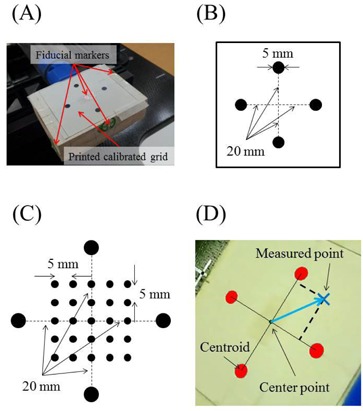
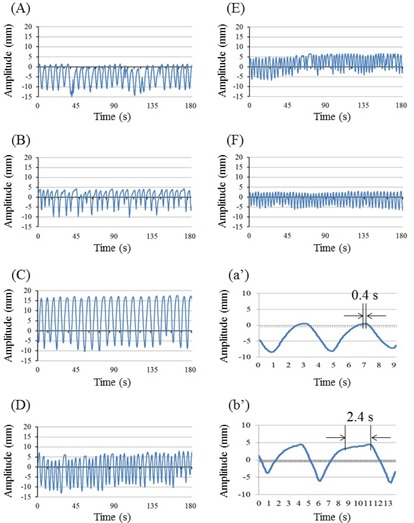
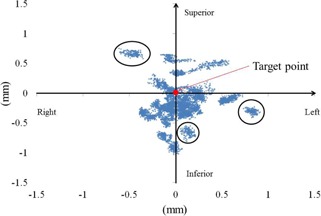
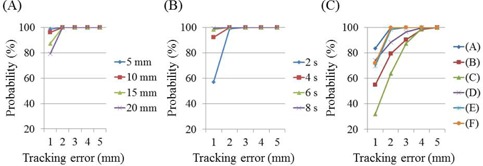
Tracking accuracy for the CyberKnife's Synchrony system is commonly evaluated using a film-based verification method. We have evaluated a verification system that uses a webcam and a printed calibrated grid to verify tracking accuracy over three different motion patterns. A box with an attached printed calibrated grid and four fiducial markers was attached to the motion phantom. A target marker was positioned at the grid's center. The box was set up using the other three markers. Target tracking accuracy was evaluated under three conditions: 1) stationary; 2) sinusoidal motion with different amplitudes of 5, 10, 15, and 20 mm for the same cycle of 4 s and different cycles of 2, 4, 6, and 8 s with the same amplitude of 15 mm; and 3) irregular breathing patterns in six human volunteers breathing normally. Infrared markers were placed on the volunteers' abdomens, and their trajectories were used to simulate the target motion. All tests were performed with one-dimensional motion in craniocaudal direction. The webcam captured the grid's motion and a laser beam was used to simulate the CyberKnife's beam. Tracking error was defined as the difference between the grid's center and the laser beam. With a stationary target, mean tracking error was measured at 0.4 mm. For sinusoidal motion, tracking error was less than 2 mm for any amplitude and breathing cycle. For the volunteers' breathing patterns, the mean tracking error range was 0.78-1.67 mm. Therefore, accurate lesion targeting requires individual quality assurance for each patient.
射波刀同步系统的跟踪精度通常采用基于胶片的验证方法进行评估。我们评估了一种验证系统,该系统使用网络摄像头和印刷的校准网格来验证三种不同运动模式下的跟踪精度。一个附有印刷校准网格和四个基准标记的盒子被连接到运动体模上。一个目标标记位于网格的中心。使用其他三个标记设置盒子。在三种条件下评估目标跟踪精度:1)静止;2)正弦运动,对于4秒的相同周期,振幅分别为5、10、15和20毫米,对于15毫米的相同振幅,周期分别为2、4、6和8秒;3)六名正常呼吸的人类志愿者的不规则呼吸模式。红外标记放置在志愿者的腹部,其轨迹用于模拟目标运动。所有测试均在头足方向进行一维运动。网络摄像头捕捉网格的运动,并用激光束模拟射波刀的光束。跟踪误差定义为网格中心与激光束之间的差值。在静止目标下,平均跟踪误差测量为0.4毫米。对于正弦运动,任何振幅和呼吸周期下的跟踪误差均小于2毫米。对于志愿者的呼吸模式,平均跟踪误差范围为0.78 - 1.67毫米。因此,精确的病灶靶向需要对每个患者进行单独的质量保证。