Schaffelhofer Stefan, Scherberger Hansjörg
Neurobiology Laboratory, German Primate Center GmbH, Göttingen, Germany.
Laboratory of Neural Systems, The Rockefeller University, New York, United States.
Elife. 2016 Jul 26;5:e15278. doi: 10.7554/eLife.15278.
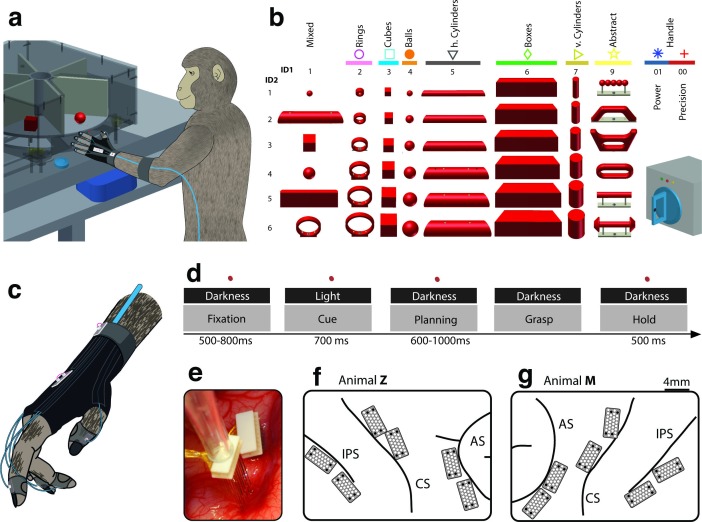
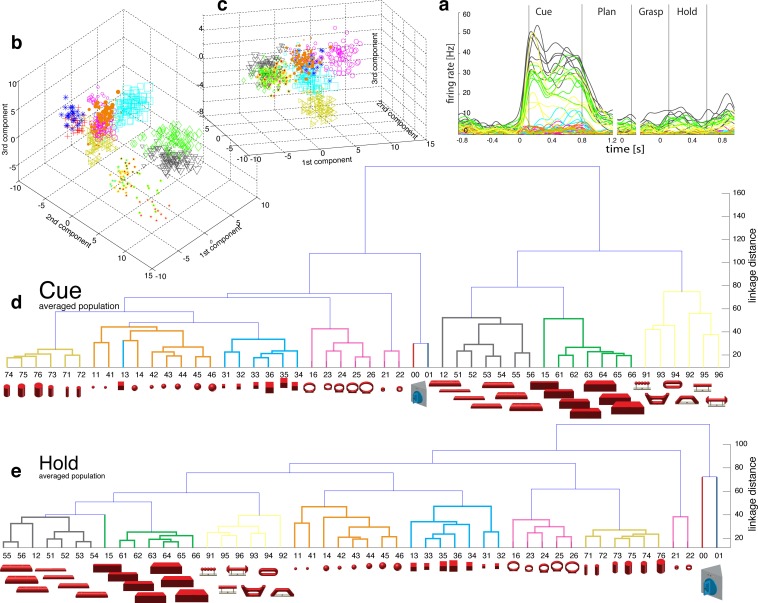
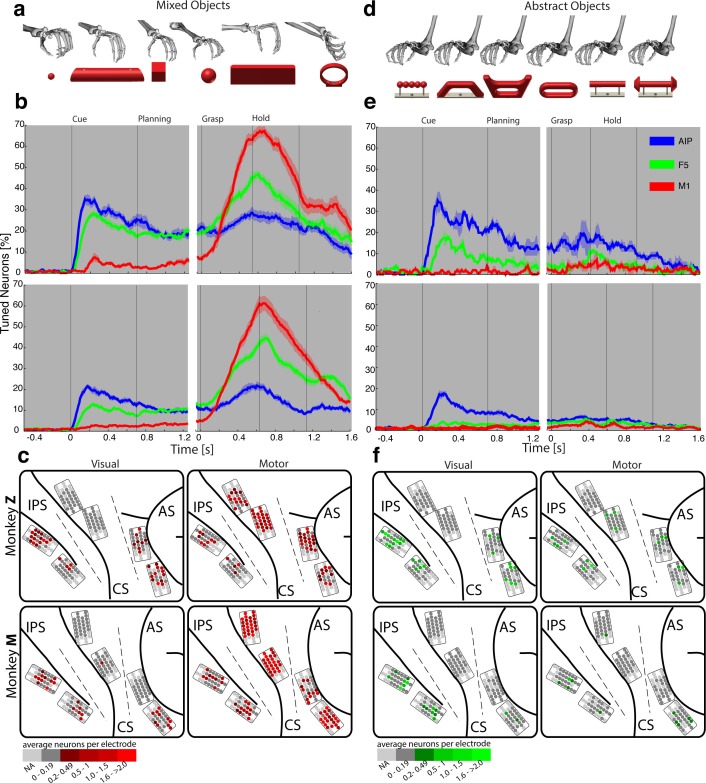
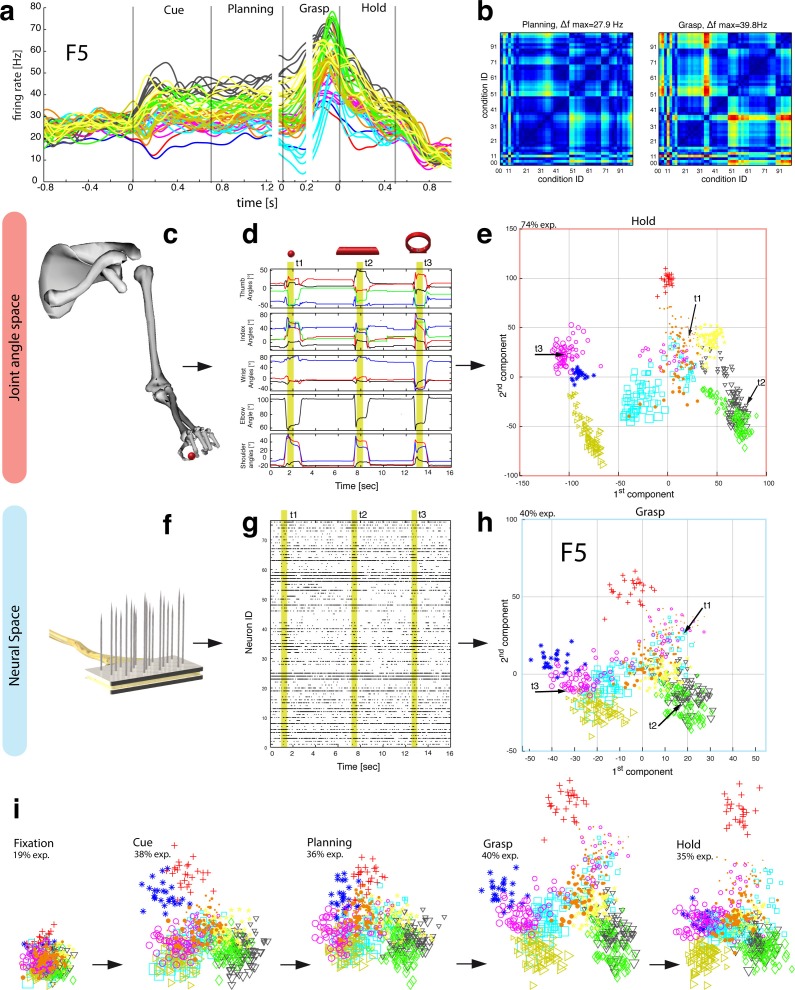
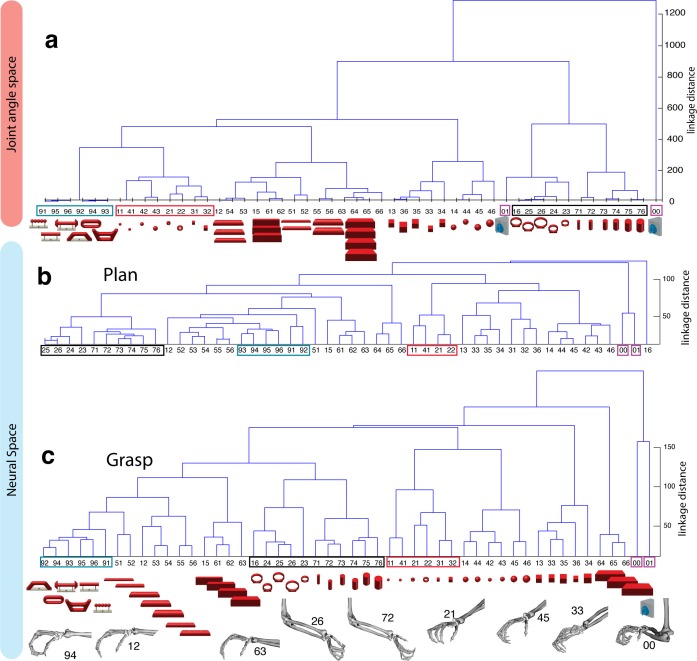
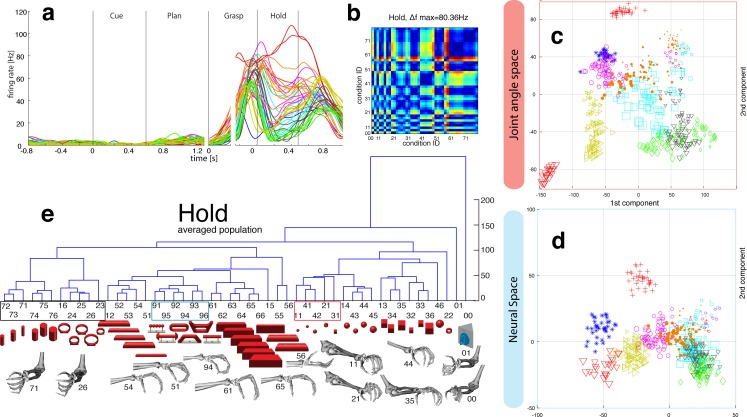
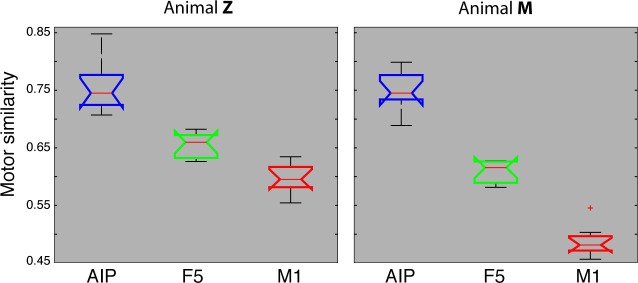
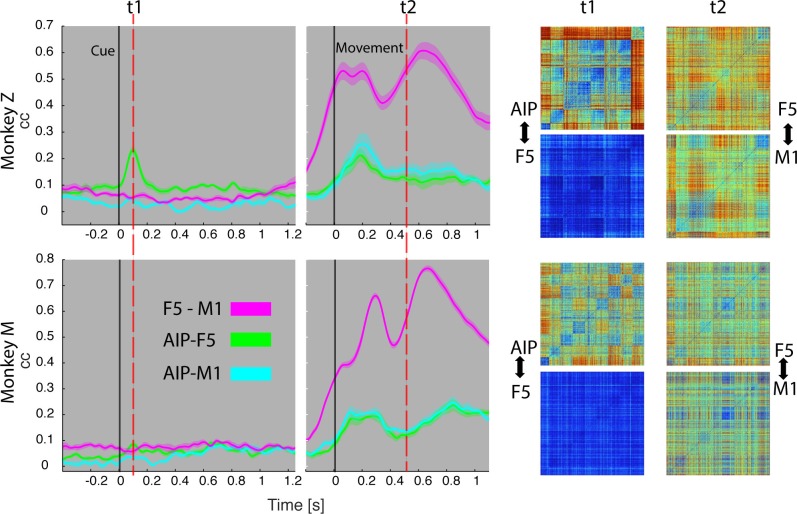
Grasping requires translating object geometries into appropriate hand shapes. How the brain computes these transformations is currently unclear. We investigated three key areas of the macaque cortical grasping circuit with microelectrode arrays and found cooperative but anatomically separated visual and motor processes. The parietal area AIP operated primarily in a visual mode. Its neuronal population revealed a specialization for shape processing, even for abstract geometries, and processed object features ultimately important for grasping. Premotor area F5 acted as a hub that shared the visual coding of AIP only temporarily and switched to highly dominant motor signals towards movement planning and execution. We visualize these non-discrete premotor signals that drive the primary motor cortex M1 to reflect the movement of the grasping hand. Our results reveal visual and motor features encoded in the grasping circuit and their communication to achieve transformation for grasping.
抓握需要将物体的几何形状转化为合适的手部形状。目前尚不清楚大脑是如何计算这些转换的。我们用微电极阵列研究了猕猴皮层抓握回路的三个关键区域,发现了视觉和运动过程虽相互协作但在解剖学上是分离的。顶叶区域AIP主要以视觉模式运作。其神经元群体表现出对形状处理的专门化,即使是对于抽象的几何形状,并且处理对抓握至关重要的物体特征。运动前区F5起到了一个枢纽的作用,它只是暂时共享AIP的视觉编码,并在运动规划和执行方面切换到高度占主导地位的运动信号。我们将这些驱动初级运动皮层M1的非离散运动前信号可视化,以反映抓握手的运动。我们的研究结果揭示了抓握回路中编码的视觉和运动特征以及它们为实现抓握转换而进行的通信。