Lyttle David N, Gill Jeffrey P, Shaw Kendrick M, Thomas Peter J, Chiel Hillel J
Department of Mathematics and Biology, Case Western Reserve University, 10900 Euclid Ave., Cleveland, OH, 44106, USA.
Department of Biology, Case Western Reserve University, 10900 Euclid Ave., Cleveland, OH, 44106, USA.
Biol Cybern. 2017 Feb;111(1):25-47. doi: 10.1007/s00422-016-0704-8. Epub 2016 Dec 21.
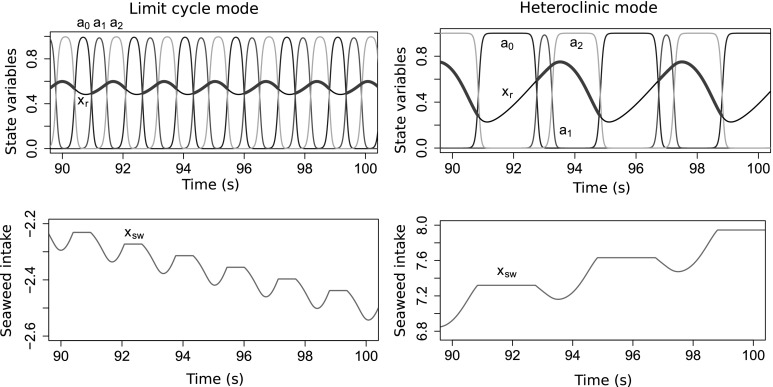
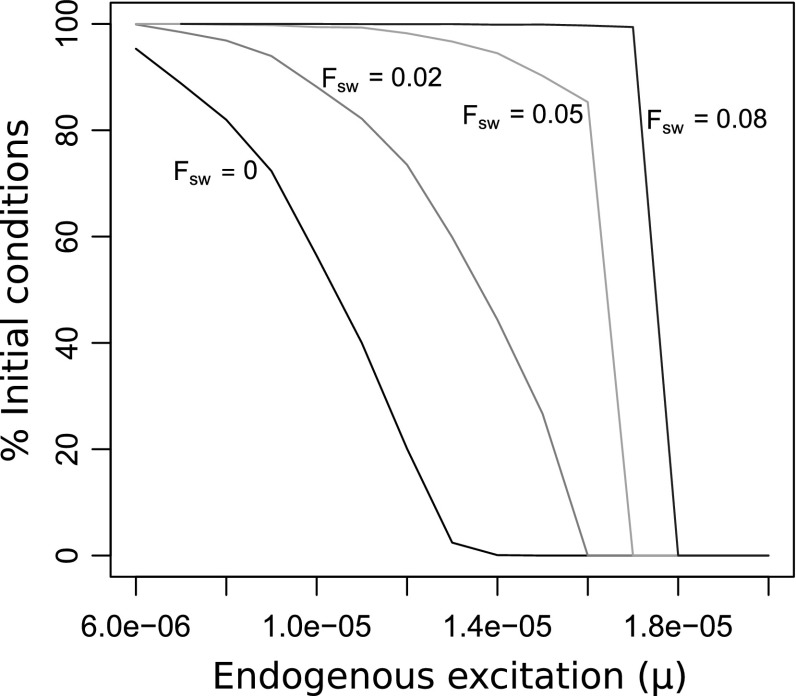
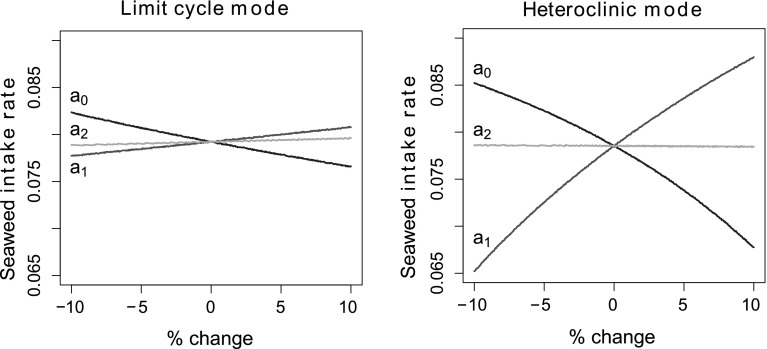
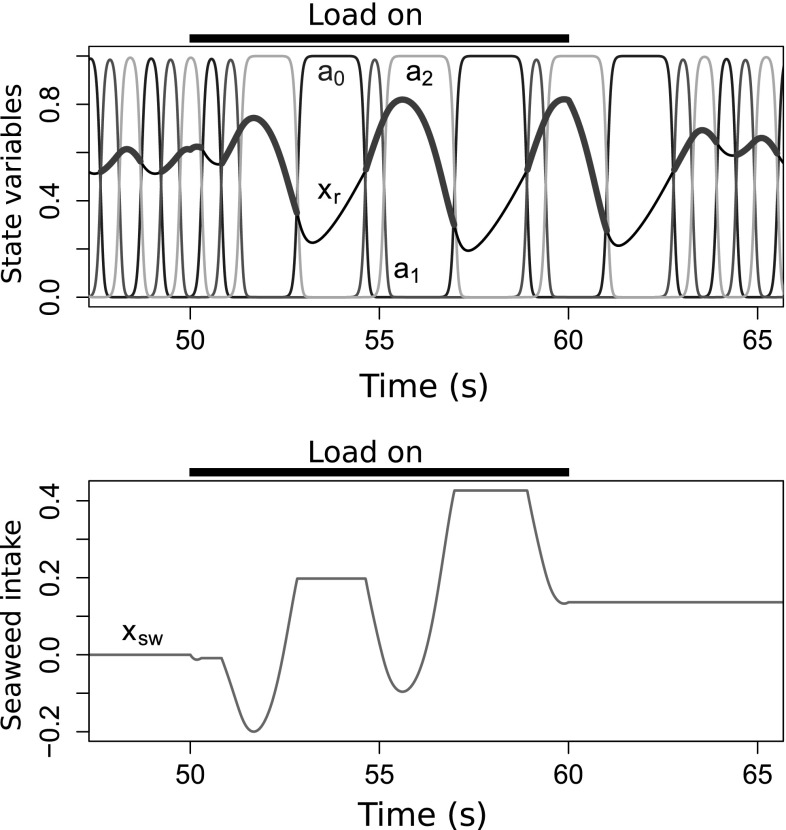
Motor systems must adapt to perturbations and changing conditions both within and outside the body. We refer to the ability of a system to maintain performance despite perturbations as "robustness," and the ability of a system to deploy alternative strategies that improve fitness as "flexibility." Different classes of pattern-generating circuits yield dynamics with differential sensitivities to perturbations and parameter variation. Depending on the task and the type of perturbation, high sensitivity can either facilitate or hinder robustness and flexibility. Here we explore the role of multiple coexisting oscillatory modes and sensory feedback in allowing multiphasic motor pattern generation to be both robust and flexible. As a concrete example, we focus on a nominal neuromechanical model of triphasic motor patterns in the feeding apparatus of the marine mollusk Aplysia californica. We find that the model can operate within two distinct oscillatory modes and that the system exhibits bistability between the two. In the "heteroclinic mode," higher sensitivity makes the system more robust to changing mechanical loads, but less robust to internal parameter variations. In the "limit cycle mode," lower sensitivity makes the system more robust to changes in internal parameter values, but less robust to changes in mechanical load. Finally, we show that overall performance on a variable feeding task is improved when the system can flexibly transition between oscillatory modes in response to the changing demands of the task. Thus, our results suggest that the interplay of sensory feedback and multiple oscillatory modes can allow motor systems to be both robust and flexible in a variable environment.
运动系统必须适应身体内部和外部的干扰以及不断变化的条件。我们将系统在受到干扰时仍能保持性能的能力称为“稳健性”,将系统部署替代策略以提高适应性的能力称为“灵活性”。不同类型的模式生成电路产生的动力学对干扰和参数变化具有不同的敏感性。根据任务和干扰类型,高敏感性既可能促进也可能阻碍稳健性和灵活性。在此,我们探讨多种共存振荡模式和感觉反馈在使多相运动模式生成兼具稳健性和灵活性方面所起的作用。作为一个具体例子,我们聚焦于海蛞蝓加州海兔进食器官中三相运动模式的一个标称神经力学模型。我们发现该模型可在两种不同的振荡模式下运行,且系统在这两种模式之间呈现双稳态。在“异宿模式”中,较高的敏感性使系统对不断变化的机械负载更具稳健性,但对内部参数变化的稳健性较低。在“极限环模式”中,较低的敏感性使系统对内部参数值的变化更具稳健性,但对机械负载变化的稳健性较低。最后,我们表明当系统能够根据任务不断变化的需求在振荡模式之间灵活转换时,在可变进食任务上的整体性能会得到改善。因此,我们的结果表明感觉反馈和多种振荡模式的相互作用可使运动系统在多变环境中兼具稳健性和灵活性。