Islam Mazharul, Hsiao-Wecksler Elizabeth T
Mechanical Science and Engineering, University of Illinois at Urbana-Champaign, Urbana, IL 61801, USA.
J Biophys. 2016;2016:7984157. doi: 10.1155/2016/7984157. Epub 2016 Dec 13.
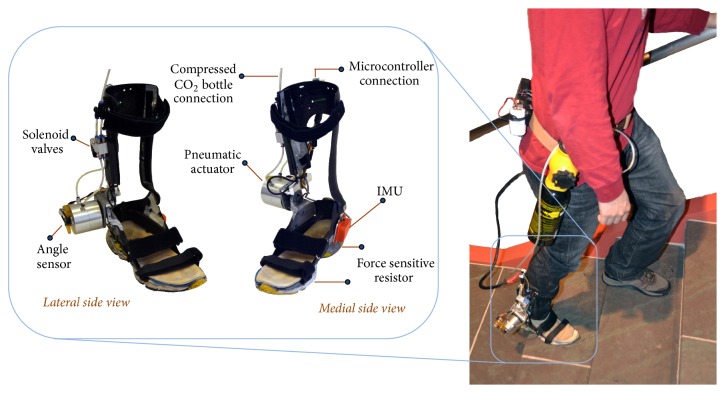
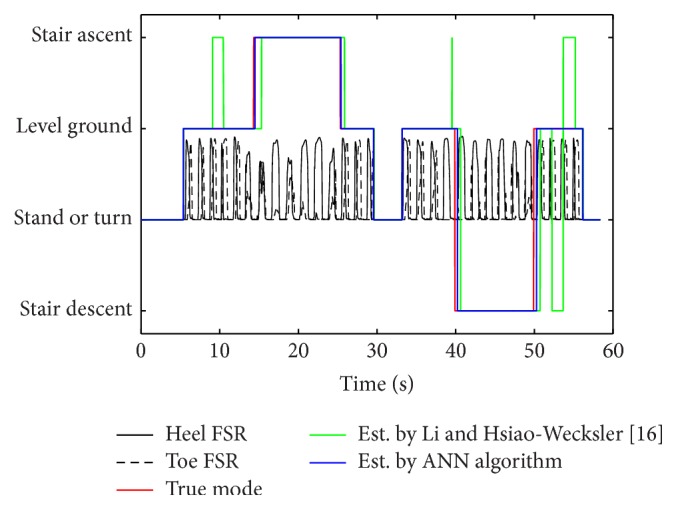
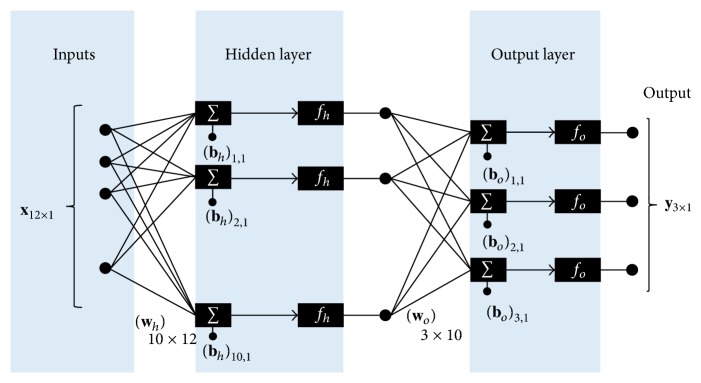
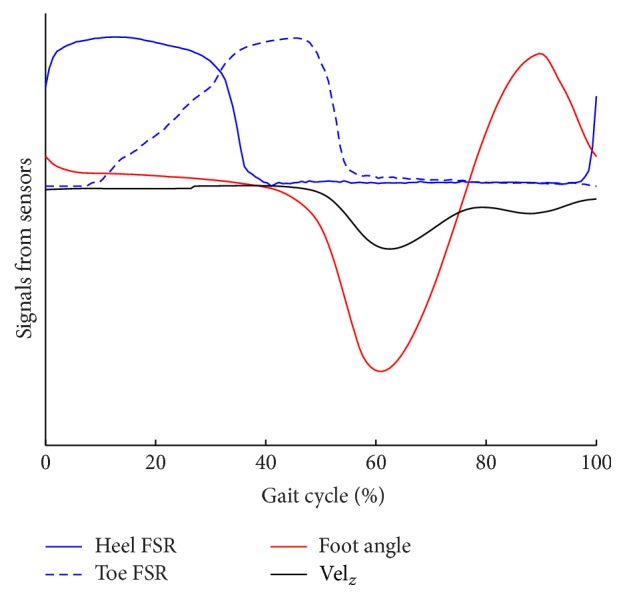
This paper presents an algorithm, for use with a Portable Powered Ankle-Foot Orthosis (i.e., PPAFO) that can automatically detect changes in gait modes (level ground, ascent and descent of stairs or ramps), thus allowing for appropriate ankle actuation control during swing phase. An artificial neural network (ANN) algorithm used input signals from an inertial measurement unit and foot switches, that is, vertical velocity and segment angle of the foot. Output from the ANN was filtered and adjusted to generate a final data set used to classify different gait modes. Five healthy male subjects walked with the PPAFO on the right leg for two test scenarios (walking over level ground and up and down stairs or a ramp; three trials per scenario). Success rate was quantified by the number of correctly classified steps with respect to the total number of steps. The results indicated that the proposed algorithm's success rate was high (99.3%, 100%, and 98.3% for level, ascent, and descent modes in the stairs scenario, respectively; 98.9%, 97.8%, and 100% in the ramp scenario). The proposed algorithm continuously detected each step's gait mode with faster timing and higher accuracy compared to a previous algorithm that used a decision tree based on maximizing the reliability of the mode recognition.
本文提出了一种算法,用于便携式动力踝足矫形器(即PPAFO),该算法能够自动检测步态模式的变化(平地行走、上下楼梯或斜坡),从而在摆动阶段实现适当的脚踝驱动控制。一种人工神经网络(ANN)算法使用来自惯性测量单元和足部开关的输入信号,即足部的垂直速度和节段角度。对ANN的输出进行滤波和调整,以生成用于分类不同步态模式的最终数据集。五名健康男性受试者穿着PPAFO在右腿上进行了两种测试场景(在平地上行走以及上下楼梯或斜坡;每个场景进行三次试验)。成功率通过正确分类的步数相对于总步数的数量来量化。结果表明,所提出算法的成功率很高(在楼梯场景中,平地、上升和下降模式的成功率分别为99.3%、100%和98.3%;在斜坡场景中分别为98.9%、97.8%和100%)。与之前使用基于最大化模式识别可靠性的决策树的算法相比,所提出的算法能够以更快的时间和更高的准确性持续检测每一步的步态模式。