Yeo Shen Ann, Noh Gyoung Tae, Han Jeong Hee, Cheong Chinock, Stein Hubert, Kerdok Amy, Min Byung Soh
Department of Colorectal Surgery, Singapore General Hospital, Outram Road, Singapore, 169608, Singapore.
Department of Surgery, Yonsei University College of Medicine, 50-1 Yonsei-ro, Seodaemun-gu, Seoul, 120-752, Korea.
J Robot Surg. 2017 Dec;11(4):399-407. doi: 10.1007/s11701-016-0664-y. Epub 2017 Feb 1.
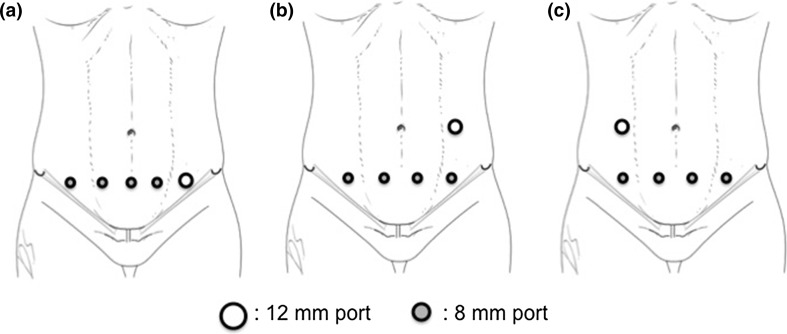
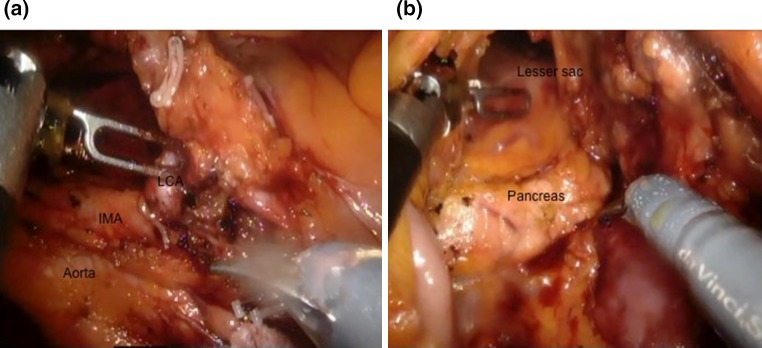
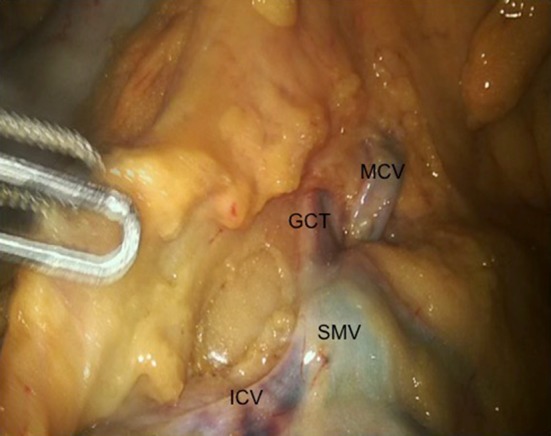
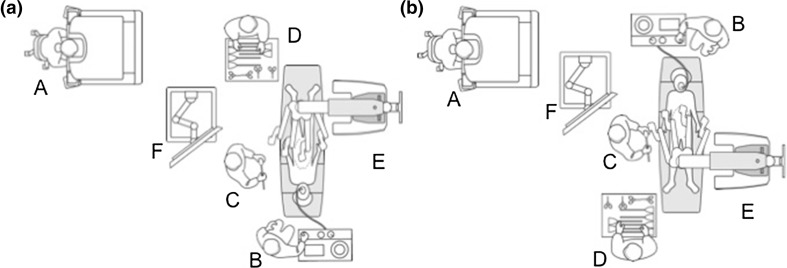
There has been little enthusiasm for performing robotic colectomy for colon cancer in recent years due to multiple factors, one being that the previous robotic systems such as the da Vinci Si (dVSi) were poorly designed for multi-quadrant surgery. The new da Vinci Xi (dVXi) system enables colectomy with central mesocolic excision to be performed easily in a single docking procedure. We developed a universal port placement strategy to allow right and left hemicolectomies to be performed via a suprapubic approach and a Pfannensteil extraction site. This proof of concept paper describes the development and subsequent clinical application of this setup. After extensive training on the dVXi system concepts in collaboration with clinical development engineers, we developed a port placement strategy which was tested and adapted after performing experimental surgery in three cadaveric models. Subsequently our port placement was used for two clinical cases of suprapubic right and left hemicolectomy. With some modifications of port placements after the initial cadaveric colectomies, we have developed a potentially universal suprapubic port placement strategy for robotic colectomy with complete mesocolic excision and central vascular ligation using the dVXi robotic system. This port placement strategy was applied successfully in our first two clinical cases. Based on our cadaveric laboratory as well as our initial clinical application, the suprapubic port placement strategy for the dVXi system with its improved features over the dVSi can feasibly perform right and left hemicolectomy with complete mesocolic excision and central vascular ligation. Further studies will be required to establish efficacy as well as safety profile of these procedures.
近年来,由于多种因素,人们对机器人辅助结肠癌切除术的热情不高,其中一个因素是,以前的机器人系统,如达芬奇Si(dVSi),在多象限手术方面设计不佳。新的达芬奇Xi(dVXi)系统能够在一次对接过程中轻松地进行中央结肠系膜切除术的结肠切除术。我们制定了一种通用的端口放置策略,以便通过耻骨上入路和Pfannensteil切口进行左右半结肠切除术。这篇概念验证论文描述了这种设置的开发及随后的临床应用。在与临床开发工程师合作对dVXi系统概念进行广泛培训后,我们制定了一种端口放置策略,该策略在三个尸体模型上进行实验手术后进行了测试和调整。随后,我们的端口放置方法被用于两例耻骨上左右半结肠切除术的临床病例。在最初的尸体结肠切除术后对端口放置进行了一些修改,我们开发了一种潜在通用的耻骨上端口放置策略,用于使用dVXi机器人系统进行完整结肠系膜切除和中央血管结扎的机器人辅助结肠切除术。这种端口放置策略在我们的前两个临床病例中成功应用。基于我们的尸体实验室以及最初的临床应用,dVXi系统的耻骨上端口放置策略相对于dVSi具有改进的功能,可以切实可行地进行完整结肠系膜切除和中央血管结扎的左右半结肠切除术。需要进一步的研究来确定这些手术的疗效和安全性。