Vujaklija Ivan, Roche Aidan D, Hasenoehrl Timothy, Sturma Agnes, Amsuess Sebastian, Farina Dario, Aszmann Oskar C
Clinic for Trauma Surgery, Orthopaedic Surgery and Plastic Surgery, Research Department for Neurorehabilitation Systems, University Medical Centre GöttingenGoettingen, Germany; Department of Bioengineering, Imperial College LondonLondon, UK.
Christian Doppler Laboratory for Restoration of Extremity Function, Medical University of Vienna, Vienna Austria.
Front Neurorobot. 2017 Feb 14;11:7. doi: 10.3389/fnbot.2017.00007. eCollection 2017.
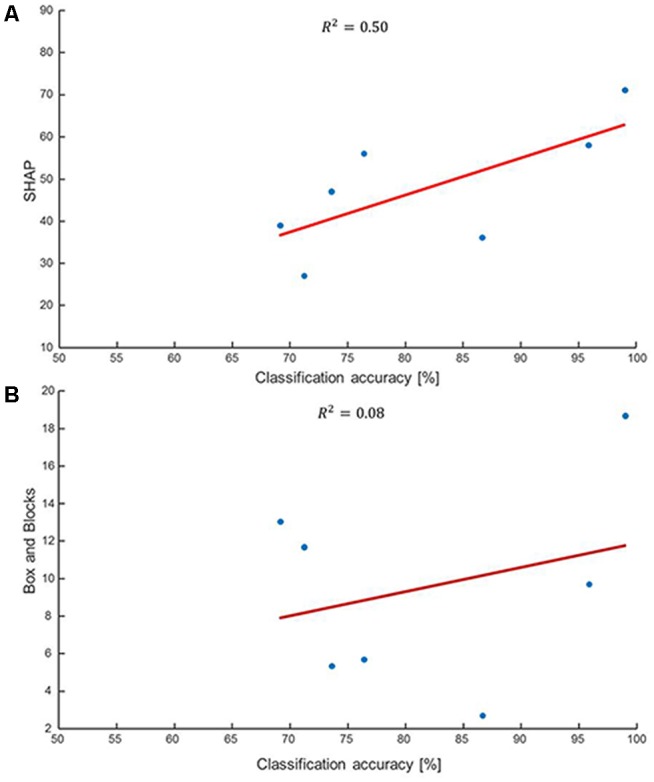
Missing an upper limb dramatically impairs daily-life activities. Efforts in overcoming the issues arising from this disability have been made in both academia and industry, although their clinical outcome is still limited. Translation of prosthetic research into clinics has been challenging because of the difficulties in meeting the necessary requirements of the market. In this perspective article, we suggest that one relevant factor determining the relatively small clinical impact of myocontrol algorithms for upper limb prostheses is the limit of commonly used laboratory performance metrics. The laboratory conditions, in which the majority of the solutions are being evaluated, fail to sufficiently replicate real-life challenges. We qualitatively support this argument with representative data from seven transradial amputees. Their ability to control a myoelectric prosthesis was tested by measuring the accuracy of offline EMG signal classification, as a typical laboratory performance metrics, as well as by clinical scores when performing standard tests of daily living. Despite all subjects reaching relatively high classification accuracy offline, their clinical scores varied greatly and were not strongly predicted by classification accuracy. We therefore support the suggestion to test myocontrol systems using clinical tests on amputees, fully fitted with sockets and prostheses highly resembling the systems they would use in daily living, as evaluation benchmark. Agreement on this level of testing for systems developed in research laboratories would facilitate clinically relevant progresses in this field.
缺失上肢会极大地损害日常生活活动能力。学术界和工业界都在努力克服因这种残疾而产生的问题,尽管它们的临床效果仍然有限。由于难以满足市场的必要要求,假肢研究转化为临床应用一直具有挑战性。在这篇观点文章中,我们认为,决定上肢假肢肌控算法临床影响相对较小的一个相关因素是常用实验室性能指标的局限性。大多数解决方案是在实验室条件下进行评估的,而这些条件未能充分复制现实生活中的挑战。我们用来自7名经桡骨截肢者的代表性数据定性地支持了这一论点。通过测量离线肌电信号分类的准确性(作为一种典型的实验室性能指标)以及在进行日常生活标准测试时的临床评分,来测试他们控制肌电假肢的能力。尽管所有受试者在离线状态下都达到了相对较高的分类准确率,但他们的临床评分差异很大,并且分类准确率并不能强烈预测临床评分。因此,我们支持使用对截肢者进行临床测试的建议,这些截肢者完全佩戴与他们日常生活中使用的系统高度相似的接受腔和假肢,以此作为评估基准。就研究实验室开发的系统达成这种测试水平的共识将促进该领域与临床相关的进展。