Whoriskey Kim, Auger-Méthé Marie, Albertsen Christoffer M, Whoriskey Frederick G, Binder Thomas R, Krueger Charles C, Mills Flemming Joanna
Department of Mathematics and Statistics Dalhousie University Halifax NS Canada.
National Institute of Aquatic Resources Technical University of Denmark Charlottenlund Denmark.
Ecol Evol. 2017 Feb 28;7(7):2112-2121. doi: 10.1002/ece3.2795. eCollection 2017 Apr.
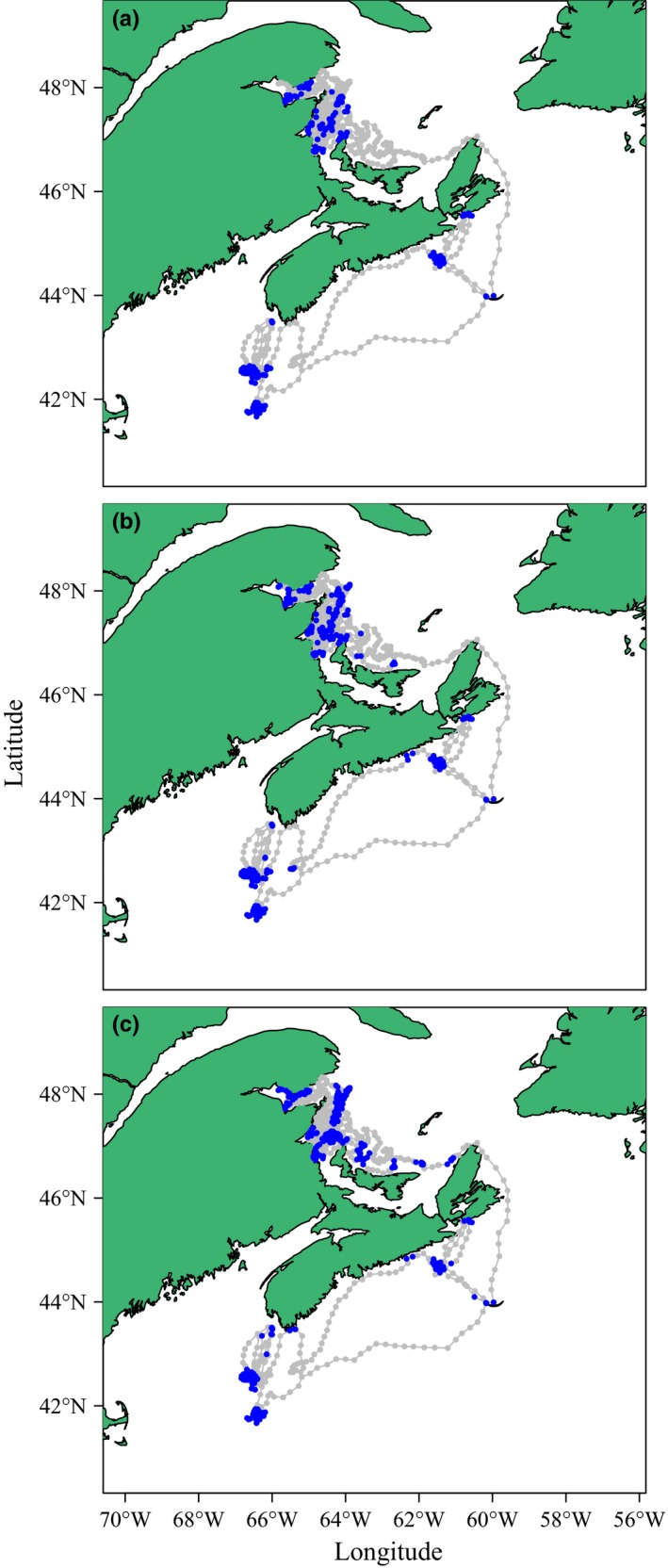
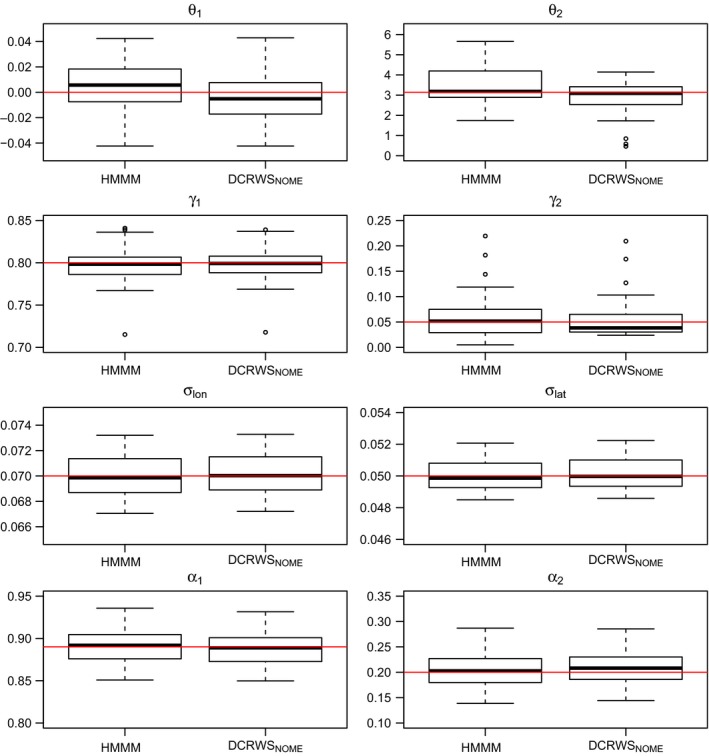
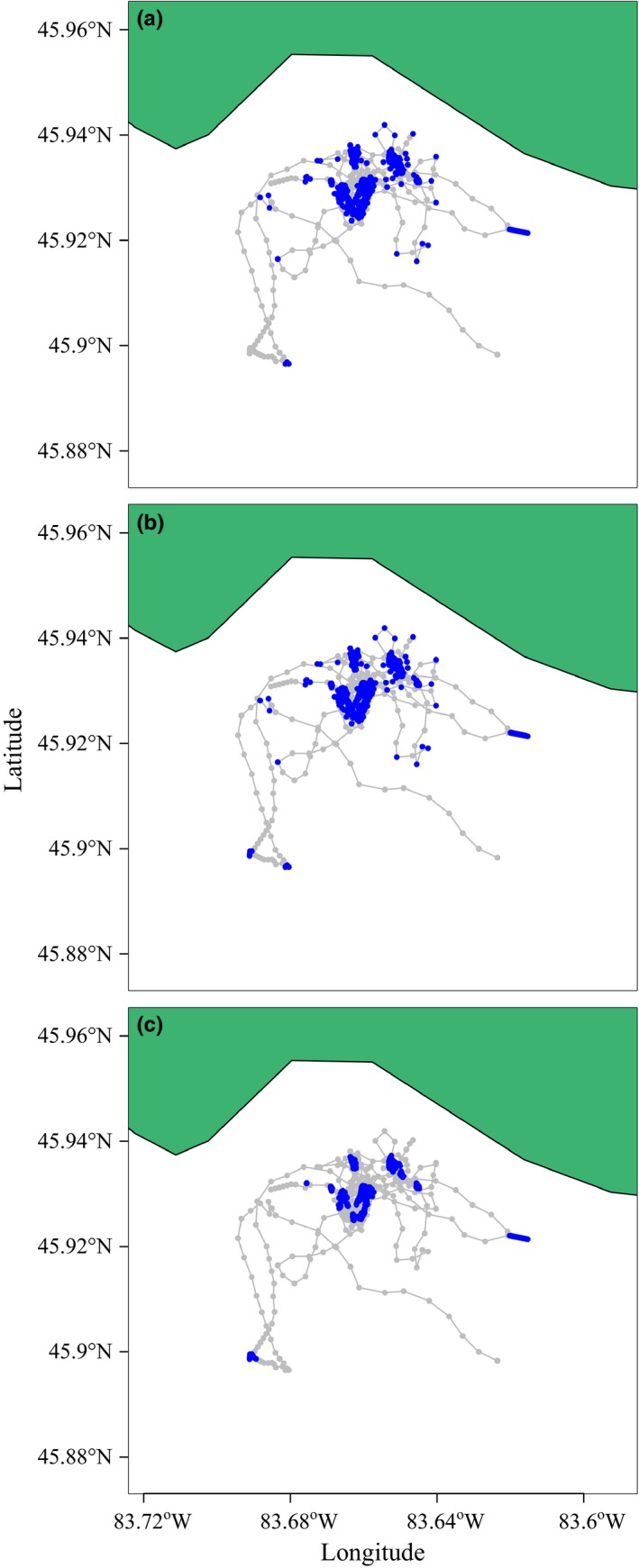
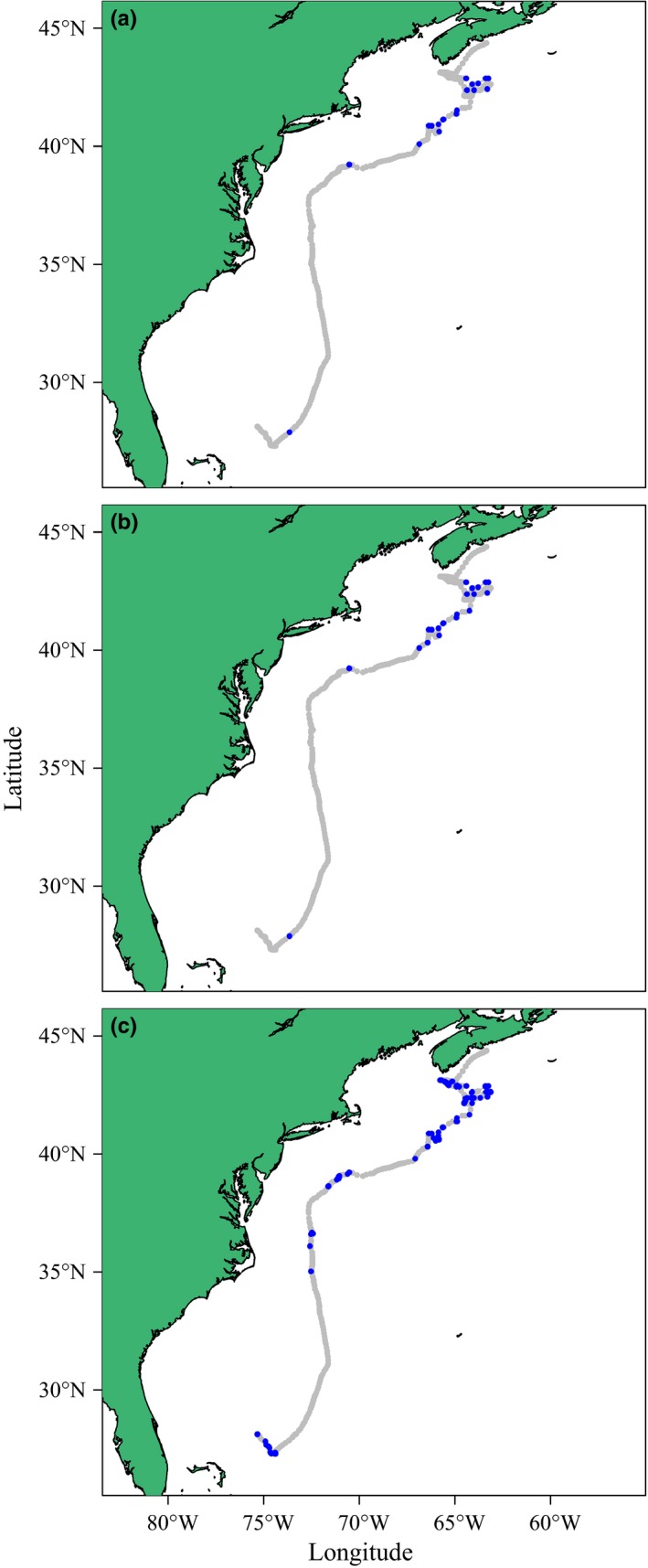
Electronic telemetry is frequently used to document animal movement through time. Methods that can identify underlying behaviors driving specific movement patterns can help us understand how and why animals use available space, thereby aiding conservation and management efforts. For aquatic animal tracking data with significant measurement error, a Bayesian state-space model called the first-Difference Correlated Random Walk with Switching (DCRWS) has often been used for this purpose. However, for aquatic animals, highly accurate tracking data are now becoming more common. We developed a new hidden Markov model (HMM) for identifying behavioral states from animal tracks with negligible error, called the hidden Markov movement model (HMMM). We implemented as the basis for the HMMM the process equation of the DCRWS, but we used the method of maximum likelihood and the R package TMB for rapid model fitting. The HMMM was compared to a modified version of the DCRWS for highly accurate tracks, the DCRWSNOME, and to a common HMM for animal tracks fitted with the R package moveHMM. We show that the HMMM is both accurate and suitable for multiple species by fitting it to real tracks from a grey seal, lake trout, and blue shark, as well as to simulated data. The HMMM is a fast and reliable tool for making meaningful inference from animal movement data that is ideally suited for ecologists who want to use the popular DCRWS implementation and have highly accurate tracking data. It additionally provides a groundwork for development of more complex modeling of animal movement with TMB. To facilitate its uptake, we make it available through the R package swim.
电子遥测技术经常用于记录动物随时间的活动情况。能够识别驱动特定运动模式的潜在行为的方法,有助于我们了解动物如何以及为何利用可用空间,从而有助于保护和管理工作。对于存在显著测量误差的水生动物追踪数据,一种名为一阶差分相关随机游走切换模型(DCRWS)的贝叶斯状态空间模型常被用于此目的。然而,对于水生动物而言,现在高精度的追踪数据越来越常见。我们开发了一种新的隐马尔可夫模型(HMM),用于从误差可忽略不计的动物轨迹中识别行为状态,称为隐马尔可夫运动模型(HMMM)。我们以DCRWS的过程方程作为HMMM的基础,但使用最大似然法和R包TMB进行快速模型拟合。将HMMM与用于高精度轨迹的DCRWS修改版本DCRWSNOME以及用于使用R包moveHMM拟合的动物轨迹的常见HMM进行了比较。通过将其应用于灰海豹、湖鳟和蓝鲨的真实轨迹以及模拟数据,我们表明HMMM既准确又适用于多个物种。HMMM是一种快速且可靠的工具,可从动物运动数据中做出有意义的推断,非常适合那些希望使用流行的DCRWS实现方式且拥有高精度追踪数据的生态学家。它还为使用TMB进行更复杂的动物运动建模奠定了基础。为便于采用,我们通过R包swim提供该模型。