Canteloup Charlotte, Meunier Hélène
Centre de Primatologie de l'Université de Strasbourg, Niederhausbergen, France.
Université de Strasbourg-Laboratoire de Neurosciences Cognitives et Adaptatives, Strasbourg, France.
PeerJ. 2017 May 3;5:e3227. doi: 10.7717/peerj.3227. eCollection 2017.
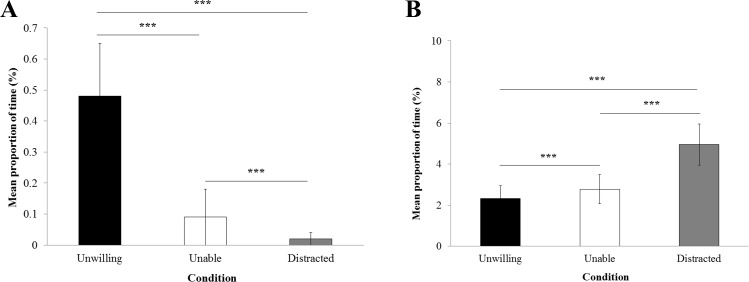
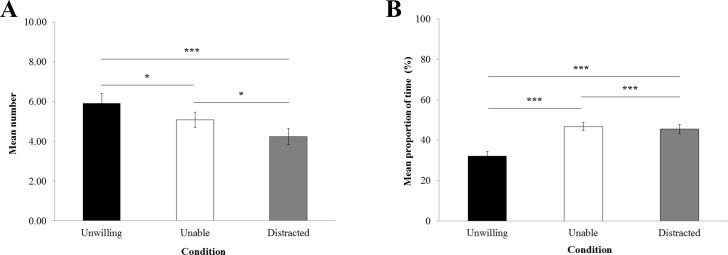
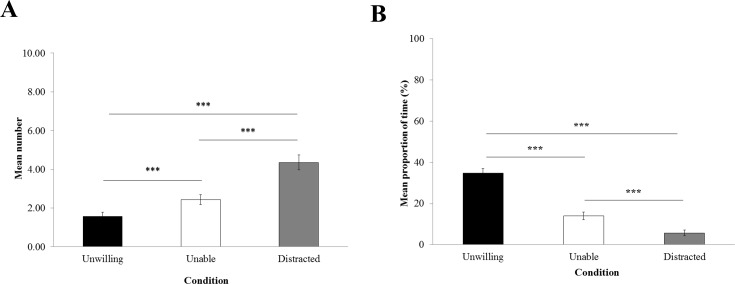
The present study investigated the understanding of goal-directed actions in Tonkean macaques () using the unwilling unable paradigm, previously used in several species. Subjects were tested in three experimental conditions that varied according to the goal-directed actions of a human actor. In the "unwilling" condition, the actor was capable of giving the subject food but unwilling to do it; in the "unable" condition, she was willing to give food but was unable to do it because of a physical barrier; and in the "distracted" condition, she was occupied by manipulating a pebble instead of food. We report for the first time that Tonkean macaques, like capuchins, chimpanzees and human infants, behaved differently across these experimental conditions. They attempted to grasp food in the actor's hand significantly more and displayed more threats in the presence of an unwilling actor rather than an unable or a distracted one. Inversely, they begged significantly more and displayed more frustration behaviors facing a distracted and unable experimenter rather than an unwilling one. These results suggest that Tonkean macaques understand human goal-directed actions by predicting whether they were likely to obtain food merely based on movements, cue and motor intentions reading and understanding of physical constraints.
本研究采用先前在多个物种中使用过的“不愿意 - 不能够”范式,调查了托氏猕猴对目标导向行为的理解。根据人类行为者的目标导向行为,受试者在三种实验条件下接受测试。在“不愿意”条件下,行为者有能力给受试者食物,但不愿意这么做;在“不能够”条件下,她愿意给食物,但由于身体障碍而无法给予;在“分心”条件下,她忙于摆弄一块卵石而不是食物。我们首次报告,托氏猕猴与卷尾猴、黑猩猩和人类婴儿一样,在这些实验条件下表现不同。在面对不愿意的行为者而非不能够或分心的行为者时,它们显著更频繁地试图抓取行为者手中的食物,并表现出更多的威胁行为。相反,面对分心和不能够给予食物的实验者而非不愿意的实验者时,它们显著更多地乞讨,并表现出更多的沮丧行为。这些结果表明,托氏猕猴通过仅基于动作、线索以及对身体限制的运动意图解读和理解来预测是否可能获得食物,从而理解人类的目标导向行为。