Indri Marina, Trapani Stefano, Lazzero Ivan
Dipartimento di Automatica e Informatica, Politecnico di Torino, Corso Duca degli Abruzzi 24, Torino 10129, Italy.
COMAU SpA, Via Rivalta 30, Grugliasco (TO) 10095, Italy.
Sensors (Basel). 2017 May 18;17(5):1148. doi: 10.3390/s17051148.
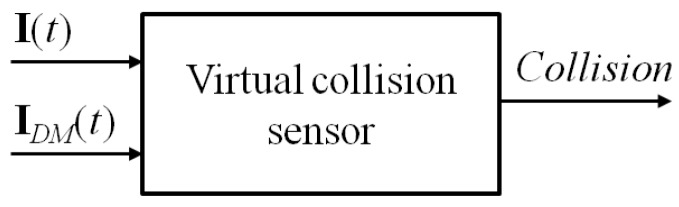
Collision detection is a fundamental issue for the safety of a robotic cell. While several common methods require specific sensors or the knowledge of the robot dynamic model, the proposed solution is constituted by a virtual collision sensor for industrial manipulators, which requires as inputs only the motor currents measured by the standard sensors that equip a manipulator and the estimated currents provided by an internal dynamic model of the robot (i.e., the one used inside its controller), whose structure, parameters and accuracy are not known. The collision detection is achieved by comparing the absolute value of the current residue with a time-varying, positive-valued threshold function, including an estimate of the model error and a bias term, corresponding to the minimum collision torque to be detected. The value of such a term, defining the sensor sensitivity, can be simply imposed as constant, or automatically customized for a specific robotic application through a learning phase and a subsequent adaptation process, to achieve a more robust and faster collision detection, as well as the avoidance of any false collision warnings, even in case of slow variations of the robot behavior. Experimental results are provided to confirm the validity of the proposed solution, which is already adopted in some industrial scenarios.
碰撞检测是机器人单元安全性的一个基本问题。虽然几种常见方法需要特定的传感器或机器人动力学模型的知识,但所提出的解决方案由一种用于工业机械手的虚拟碰撞传感器构成,该传感器仅需要作为输入的由配备机械手的标准传感器测量的电机电流以及由机器人内部动力学模型(即其控制器内部使用的模型)提供的估计电流,其结构、参数和精度是未知的。通过将电流残差的绝对值与一个随时间变化的正值阈值函数进行比较来实现碰撞检测,该阈值函数包括模型误差的估计和一个偏差项,对应于要检测的最小碰撞扭矩。定义传感器灵敏度的该项的值可以简单地设定为常数,或者通过一个学习阶段和随后的自适应过程针对特定的机器人应用自动定制,以实现更鲁棒、更快的碰撞检测,以及避免任何误碰撞警告,即使在机器人行为缓慢变化的情况下也是如此。提供了实验结果以证实所提出解决方案的有效性,该方案已在一些工业场景中采用。