Combettes Christophe, Renaudin Valérie
GEOLOC laboratory, The French Institute of Science and Technology for Transport, Spatial Planning, Development and Networks (IFSTTAR), Route de Bouaye CS4, 44344 Bouguenais Cedex, France.
Micromachines (Basel). 2016 May 2;7(5):79. doi: 10.3390/mi7050079.
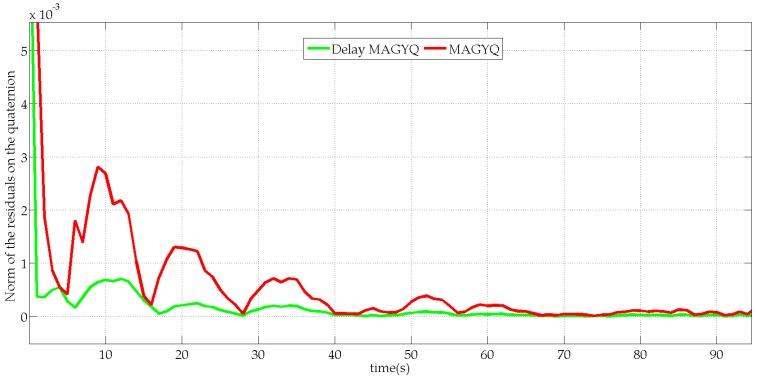
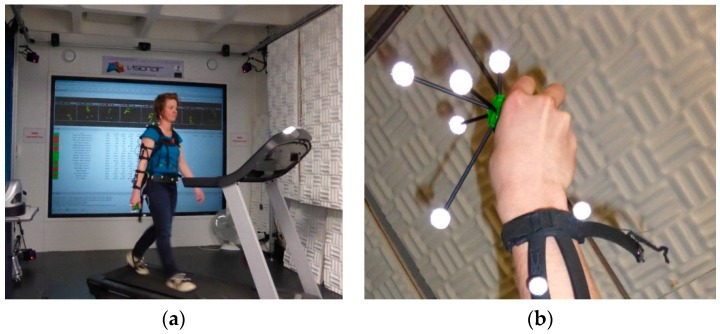
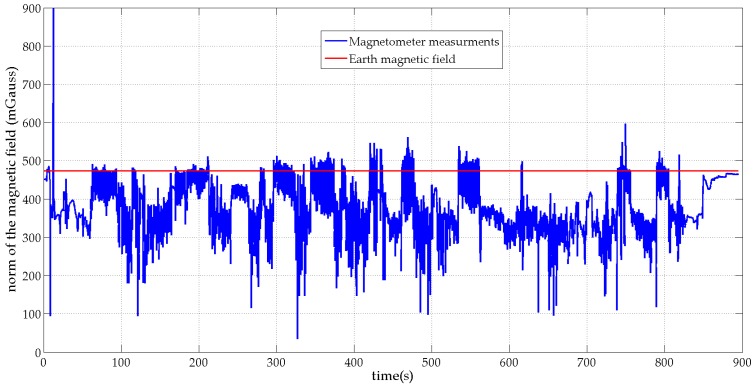
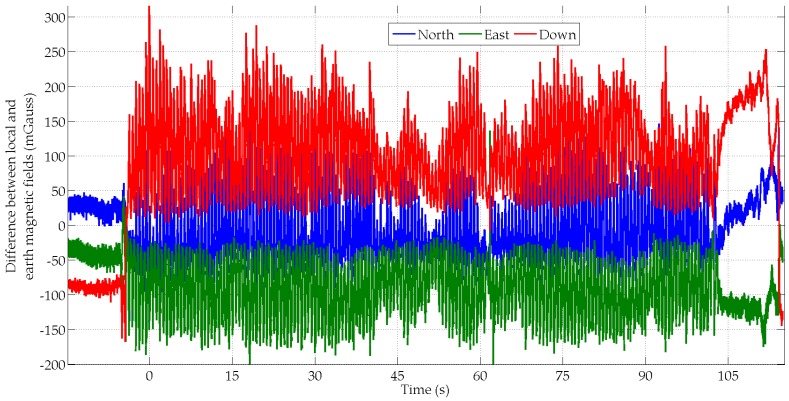
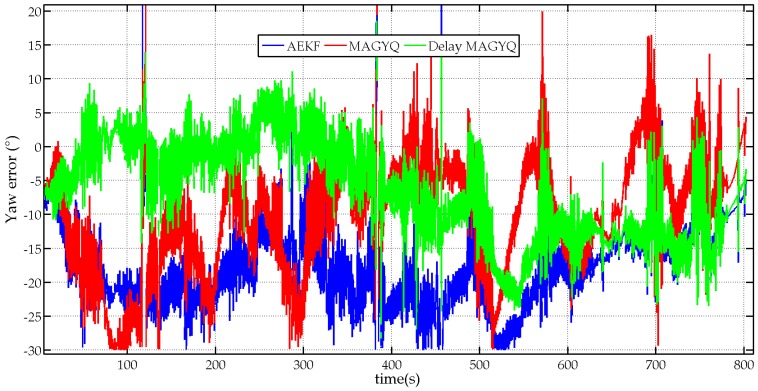
More and more services are based on knowing the location of pedestrians equipped with connected objects (smartphones, smartwatches, .). One part of the location estimation process is attitude estimation. Many algorithms have been proposed but they principally target open space areas where the local magnetic field equals the Earth's field. Unfortunately, this approach is impossible indoors, where the use of magnetometer arrays or magnetic field gradients has been proposed. However, current approaches omit the impact of past state estimates on the current orientation estimate, especially when a reference field is computed over a sliding window. A novel Delay Kalman filter is proposed in this paper to integrate this time correlation: the Delay MAGYQ. Experimental assessment, conducted in a motion lab with a handheld inertial and magnetic mobile unit, shows that the novel filter better estimates the Euler angles of the handheld device with an 11.7° mean error on the yaw angle as compared to 16.4° with a common Additive Extended Kalman filter.
越来越多的服务基于了解配备连接设备(智能手机、智能手表等)的行人的位置。位置估计过程的一部分是姿态估计。已经提出了许多算法,但它们主要针对局部磁场等于地磁场的开放空间区域。不幸的是,这种方法在室内是不可能的,在室内有人提出使用磁力计阵列或磁场梯度。然而,当前的方法忽略了过去状态估计对当前方向估计的影响,特别是当在滑动窗口上计算参考场时。本文提出了一种新颖的延迟卡尔曼滤波器来整合这种时间相关性:延迟MAGYQ。在运动实验室中使用手持式惯性和磁性移动单元进行的实验评估表明,与普通的加性扩展卡尔曼滤波器相比,新型滤波器能更好地估计手持式设备的欧拉角,偏航角的平均误差为11.7°,而普通滤波器为16.4°。