Passon Arne, Schauer Thomas, Seel Thomas
Control Systems Group, Technische Universität Berlin, Berlin, Germany.
Front Robot AI. 2020 Nov 27;7:554639. doi: 10.3389/frobt.2020.554639. eCollection 2020.
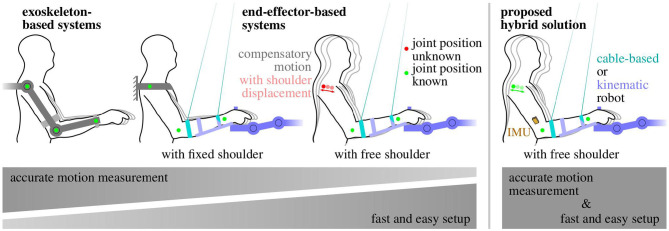
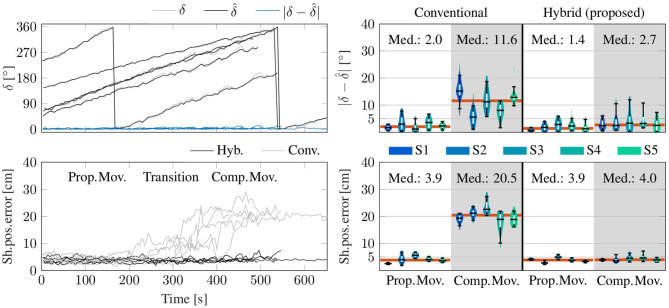
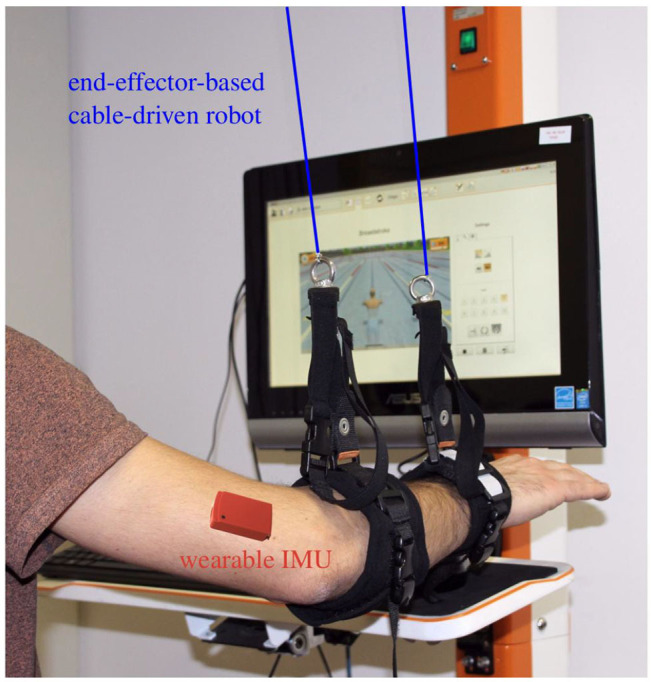
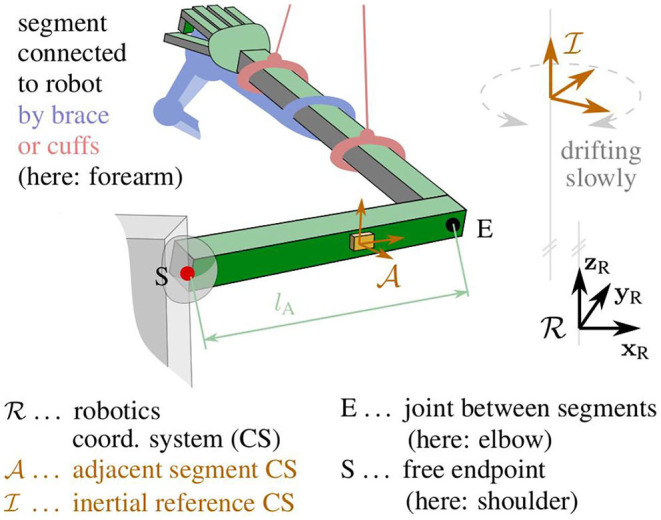
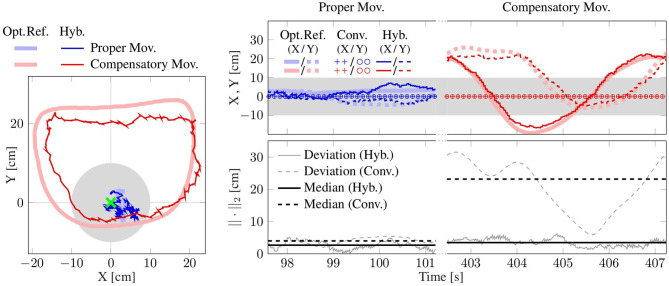
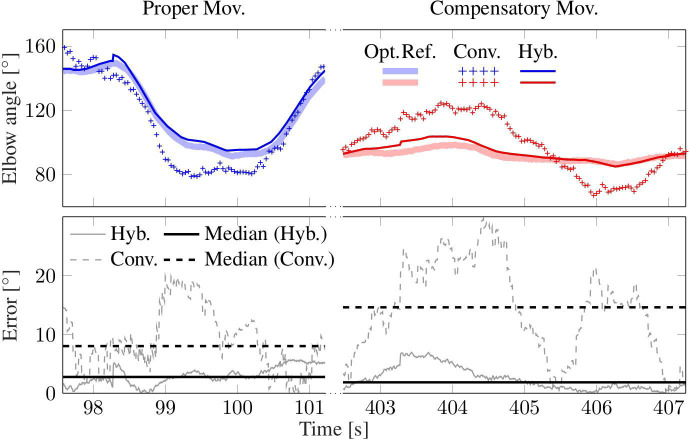
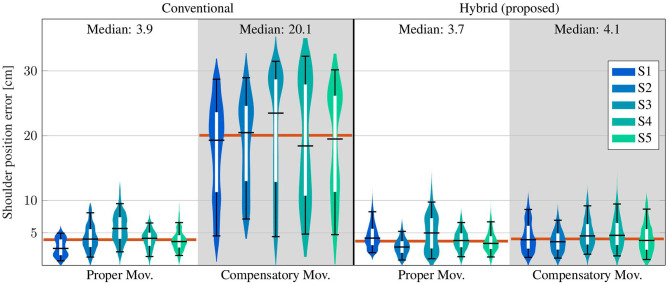
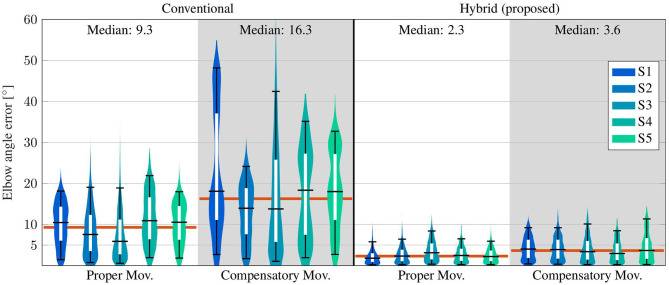
End-effector-based robotic systems provide easy-to-set-up motion support in rehabilitation of stroke and spinal-cord-injured patients. However, measurement information is obtained only about the motion of the limb segments to which the systems are attached and not about the adjacent limb segments. We demonstrate in one particular experimental setup that this limitation can be overcome by augmenting an end-effector-based robot with a wearable inertial sensor. Most existing inertial motion tracking approaches rely on a homogeneous magnetic field and thus fail in indoor environments and near ferromagnetic materials and electronic devices. In contrast, we propose a magnetometer-free sensor fusion method. It uses a quaternion-based algorithm to track the heading of a limb segment in real time by combining the gyroscope and accelerometer readings with position measurements of one point along that segment. We apply this method to an upper-limb rehabilitation robotics use case in which the orientation and position of the forearm and elbow are known, and the orientation and position of the upper arm and shoulder are estimated by the proposed method using an inertial sensor worn on the upper arm. Experimental data from five healthy subjects who performed 282 proper executions of a typical rehabilitation motion and 163 executions with compensation motion are evaluated. Using a camera-based system as a ground truth, we demonstrate that the shoulder position and the elbow angle are tracked with median errors around 4 cm and 4°, respectively; and that undesirable compensatory shoulder movements, which were defined as shoulder displacements greater ±10 cm for more than 20% of a motion cycle, are detected and classified 100% correctly across all 445 performed motions. The results indicate that wearable inertial sensors and end-effector-based robots can be combined to provide means for effective rehabilitation therapy with likewise detailed and accurate motion tracking for performance assessment, real-time biofeedback and feedback control of robotic and neuroprosthetic motion support.
基于末端执行器的机器人系统在中风和脊髓损伤患者的康复中提供了易于设置的运动支持。然而,仅获取了关于系统所连接肢体节段的运动测量信息,而未获取相邻肢体节段的信息。我们在一个特定的实验装置中证明,通过为基于末端执行器的机器人增加一个可穿戴惯性传感器,可以克服这一限制。大多数现有的惯性运动跟踪方法依赖于均匀磁场,因此在室内环境以及靠近铁磁材料和电子设备时会失效。相比之下,我们提出了一种无磁强计的传感器融合方法。它使用基于四元数的算法,通过将陀螺仪和加速度计读数与沿该节段一点的位置测量相结合,实时跟踪肢体节段的方向。我们将此方法应用于上肢康复机器人用例,其中已知前臂和肘部的方向和位置,并使用佩戴在上臂的惯性传感器通过所提出的方法估计上臂和肩部的方向和位置。对五名健康受试者进行典型康复运动的282次正确执行以及163次补偿运动执行的实验数据进行了评估。使用基于摄像头的系统作为基准,我们证明肩部位置和肘部角度的跟踪中值误差分别约为4厘米和4°;并且在所有445次执行的运动中,被定义为在超过20%的运动周期内肩部位移大于±10厘米的不良补偿性肩部运动被100%正确检测和分类。结果表明,可穿戴惯性传感器和基于末端执行器的机器人可以结合起来,为有效的康复治疗提供手段,同时为性能评估、实时生物反馈以及机器人和神经假体运动支持的反馈控制提供同样详细和准确的运动跟踪。