School of Civil and Environmental Engineering, Georgia Institute of Technology 5142B Jesse W. Mason Building, 790 Atlantic Drive NW, Atlanta, GA, 30332, USA.
George W. Woodruff School of Mechanical Engineering, Georgia Institute of Technology 801 Ferst Drive MRDC 4104, Atlanta, GA, 30332, USA.
Sci Rep. 2017 Jun 14;7(1):3511. doi: 10.1038/s41598-017-03412-6.
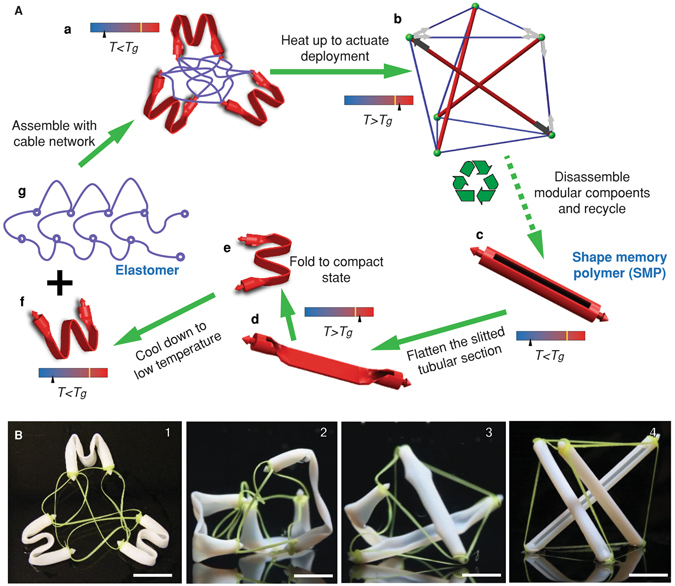
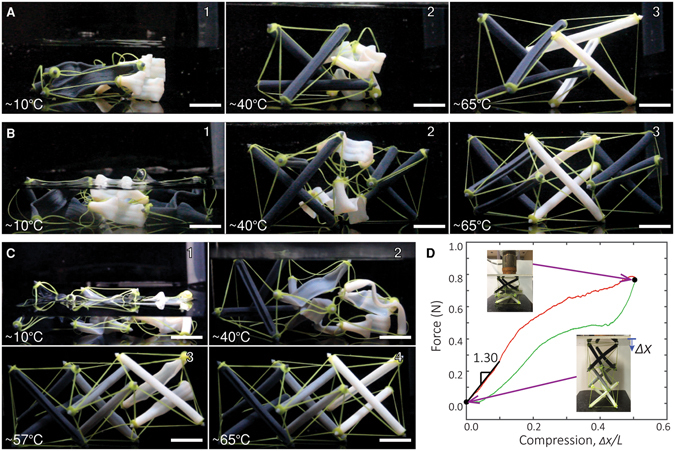
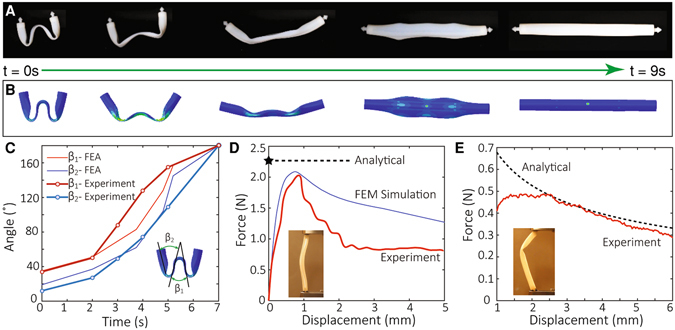
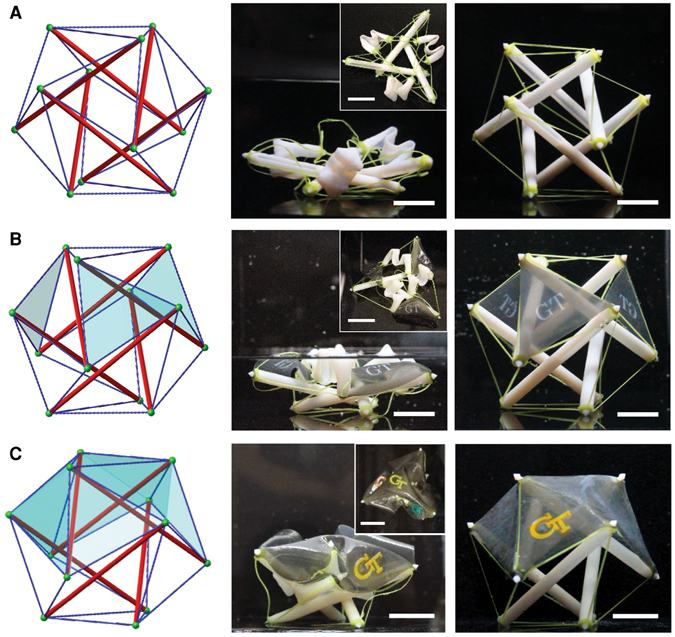
Tensegrity structures with detached struts are naturally suitable for deployable applications, both in terrestrial and outer-space structures, as well as morphing devices. Composed of discontinuous struts and continuous cables, such systems are only structurally stable when self-stress is induced; otherwise, they lose the original geometrical configuration (while keeping the topology) and thus can be tightly packed. We exploit this feature by using stimulus responsive polymers to introduce a paradigm for creating actively deployable 3D structures with complex shapes. The shape-change of 3D printed smart materials adds an active dimension to the configurational space of some structural components. Then we achieve dramatic global volume expansion by amplifying component-wise deformations to global configurational change via the inherent deployability of tensegrity. Through modular design, we can generate active tensegrities that are relatively stiff yet resilient with various complexities. Such unique properties enable structural systems that can achieve gigantic shape change, making them ideal as a platform for super light-weight structures, shape-changing soft robots, morphing antenna and RF devices, and biomedical devices.
分离式支杆的张紧整体结构自然适用于可展开应用,无论是在地面和外太空结构,还是变形装置中。由不连续的支杆和连续的缆索组成,此类系统仅在自应力诱导时才具有结构稳定性;否则,它们会失去原始的几何形状(同时保持拓扑结构),从而可以紧密包装。我们利用刺激响应聚合物的这一特性,为创建具有复杂形状的主动可展开 3D 结构引入了一种范例。3D 打印智能材料的形状变化为一些结构组件的配置空间增加了一个主动维度。然后,我们通过利用张紧整体结构固有的可展开性,将组件的变形放大到全局配置变化,从而实现了显著的全局体积膨胀。通过模块化设计,我们可以生成具有各种复杂度的相对刚性但有弹性的主动张紧结构。这些独特的特性使结构系统能够实现巨大的形状变化,使其成为超轻量级结构、形状变化的软机器人、变形天线和射频设备以及生物医学设备的理想平台。