Bristol Robotics Laboratory, University of the West of England, Coldharbour Lane, Bristol, BS161QY, UK.
Aston University, Birmingham, B47ET, UK.
Ann Biomed Eng. 2017 Nov;45(11):2648-2662. doi: 10.1007/s10439-017-1901-x. Epub 2017 Aug 16.
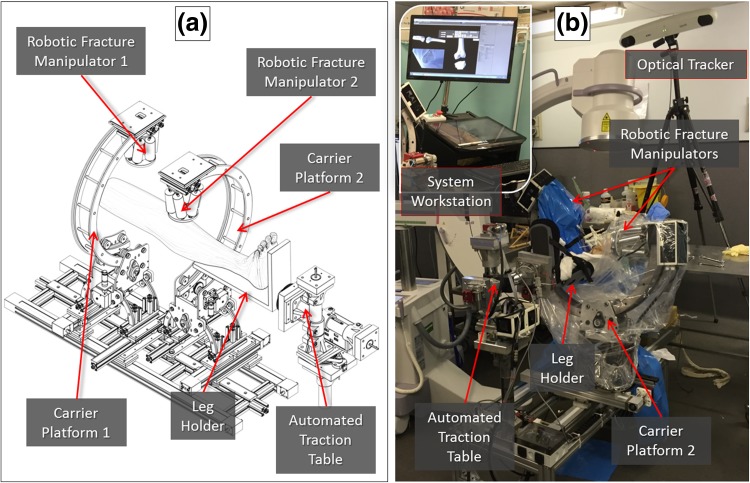
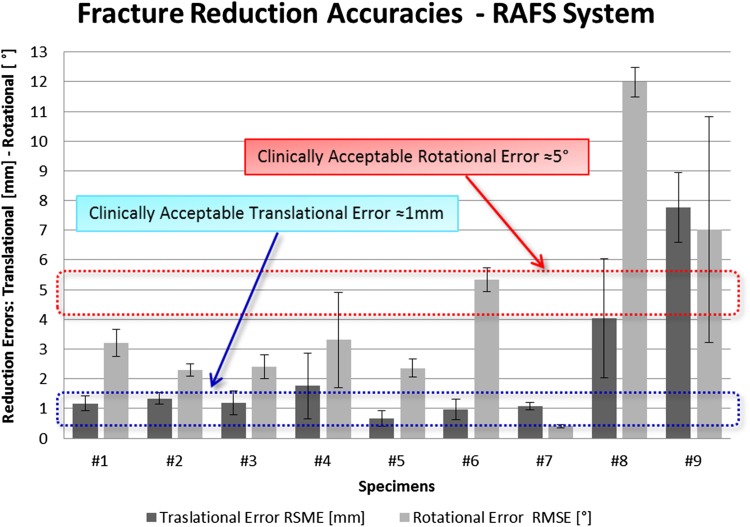
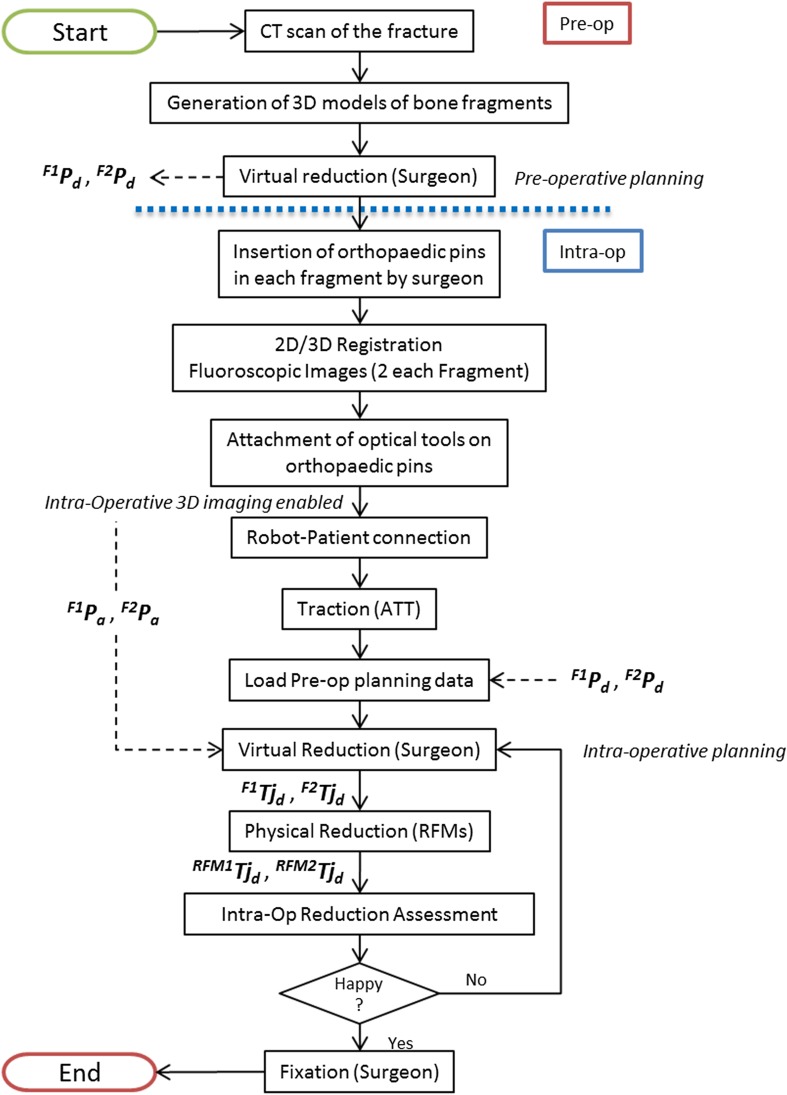
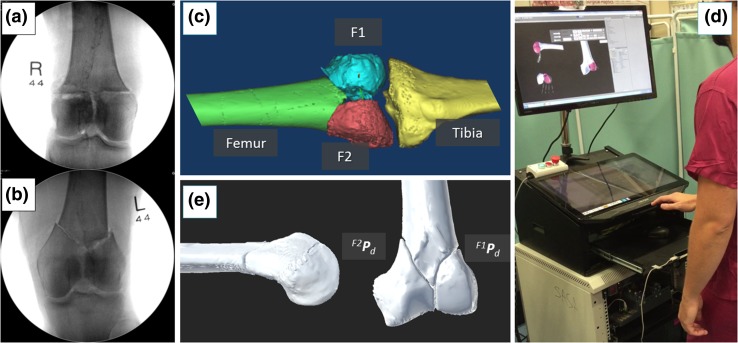
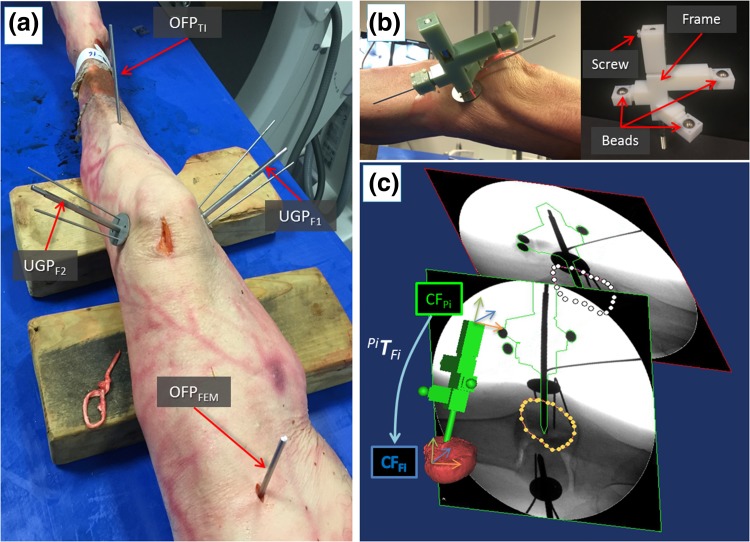
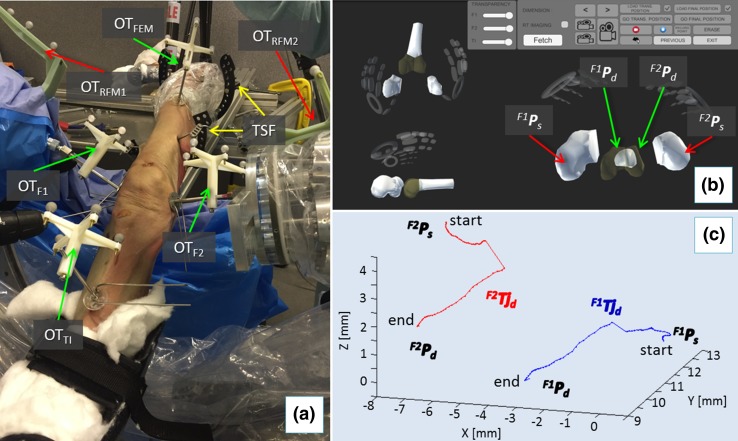
Complex joint fractures often require an open surgical procedure, which is associated with extensive soft tissue damages and longer hospitalization and rehabilitation time. Percutaneous techniques can potentially mitigate these risks but their application to joint fractures is limited by the current sub-optimal 2D intra-operative imaging (fluoroscopy) and by the high forces involved in the fragment manipulation (due to the presence of soft tissue, e.g., muscles) which might result in fracture malreduction. Integration of robotic assistance and 3D image guidance can potentially overcome these issues. The authors propose an image-guided surgical robotic system for the percutaneous treatment of knee joint fractures, i.e., the robot-assisted fracture surgery (RAFS) system. It allows simultaneous manipulation of two bone fragments, safer robot-bone fixation system, and a traction performing robotic manipulator. This system has led to a novel clinical workflow and has been tested both in laboratory and in clinically relevant cadaveric trials. The RAFS system was tested on 9 cadaver specimens and was able to reduce 7 out of 9 distal femur fractures (T- and Y-shape 33-C1) with acceptable accuracy (≈1 mm, ≈5°), demonstrating its applicability to fix knee joint fractures. This study paved the way to develop novel technologies for percutaneous treatment of complex fractures including hip, ankle, and shoulder, thus representing a step toward minimally-invasive fracture surgeries.
复杂关节骨折通常需要进行开放式手术,这会导致广泛的软组织损伤,并延长住院和康复时间。经皮技术可能会降低这些风险,但由于目前术中成像(透视)效果不理想,以及在碎片操作中涉及到的高力量(由于存在软组织,如肌肉),可能导致骨折复位不良,因此其在关节骨折中的应用受到限制。机器人辅助和 3D 图像引导的集成可能会克服这些问题。作者提出了一种用于膝关节骨折经皮治疗的图像引导手术机器人系统,即机器人辅助骨折手术(RAFS)系统。它允许同时操作两个骨碎片,具有更安全的机器人-骨固定系统和执行牵引的机器人操纵器。该系统带来了一种新的临床工作流程,已在实验室和临床相关的尸体试验中进行了测试。RAFS 系统在 9 个尸体标本上进行了测试,能够以可接受的精度(≈1mm,≈5°)减少 7 个股骨远端骨折(T 形和 Y 形 33-C1),证明其适用于固定膝关节骨折。这项研究为开发用于治疗髋部、踝部和肩部等复杂骨折的新技术铺平了道路,从而代表了向微创骨折手术迈进的一步。