Lobo-Prat Joan, Janssen Mariska M H P, Koopman Bart F J M, Stienen Arno H A, de Groot Imelda J M
Department of Biomechanical Engineering, University of Twente, Drienerlolaan 5, Enschede, 7522 NB, The Netherlands.
Department of Rehabilitation, Radboud University Medical Center, Reinier Postlaan 4, Nijmegen, 6500 HB, The Netherlands.
J Neuroeng Rehabil. 2017 Aug 29;14(1):86. doi: 10.1186/s12984-017-0292-4.
Robotic arm supports aim at improving the quality of life for adults with Duchenne muscular dystrophy (DMD) by augmenting their residual functional abilities. A critical component of robotic arm supports is the control interface, as is it responsible for the human-machine interaction. Our previous studies showed the feasibility of using surface electromyography (sEMG) as a control interface to operate robotic arm supports in adults with DMD (22-24 years-old). However, in the biomedical engineering community there is an often raised skepticism on whether adults with DMD at the last stage of their disease have sEMG signals that can be measured and used for control.
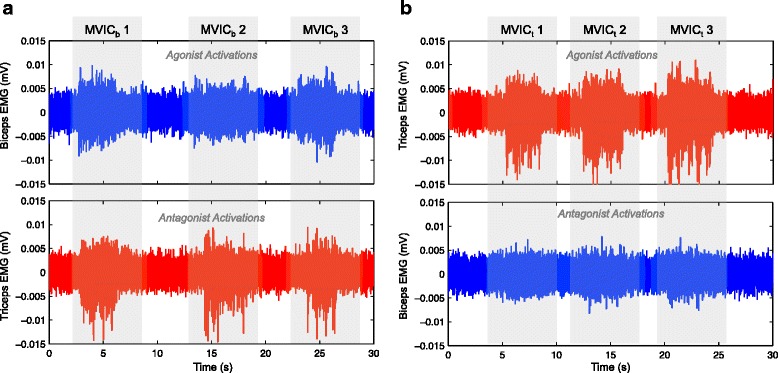
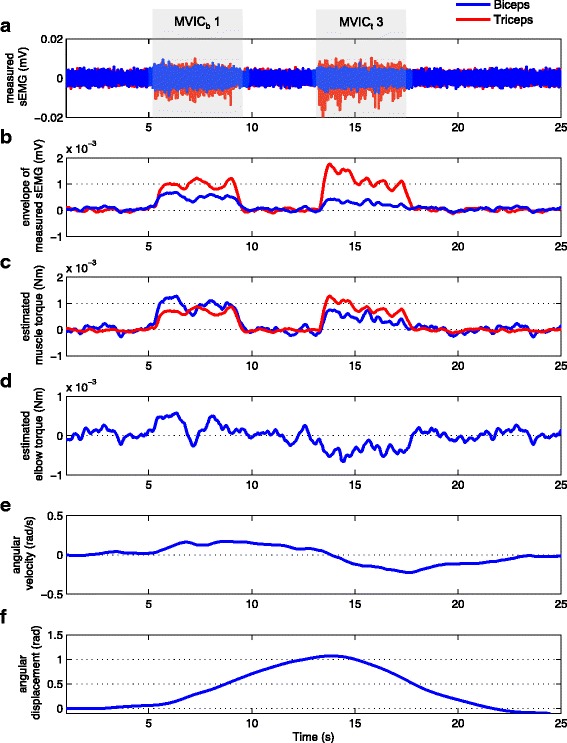
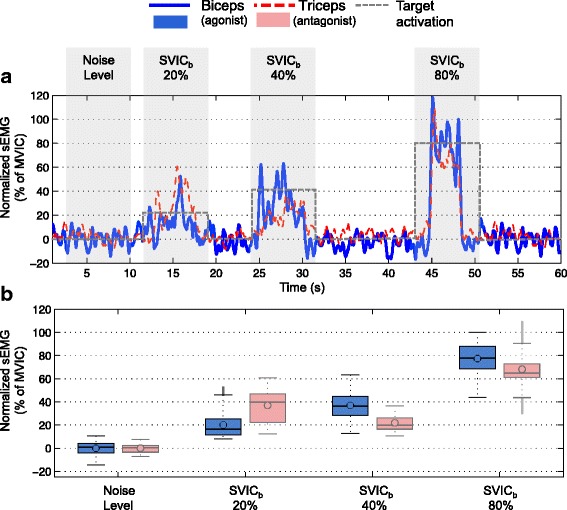
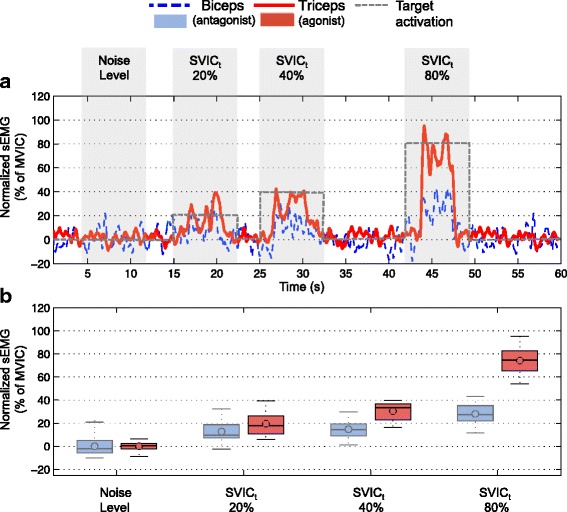
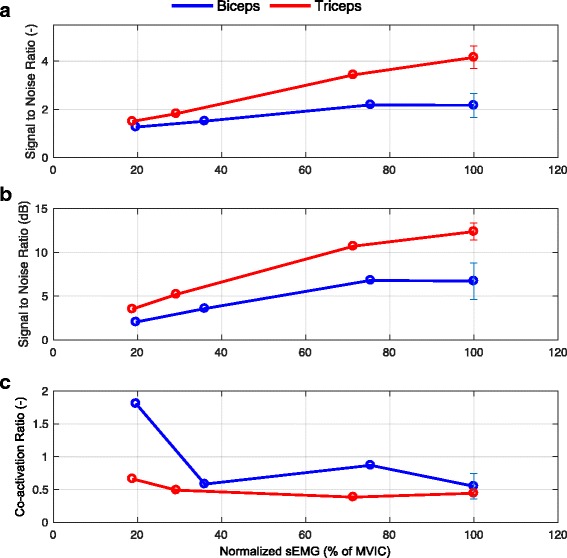
In this study sEMG signals from Biceps and Triceps Brachii muscles were measured for the first time in a 37 year-old man with DMD (Brooke 6) that lost his arm function 15 years ago. The sEMG signals were measured during maximal and sub-maximal voluntary isometric contractions and evaluated in terms of signal-to-noise ratio and co-activation ratio. Beyond the profound deterioration of the muscles, we found that sEMG signals from both Biceps and Triceps muscles were measurable in this individual, although with a maximum signal amplitude 100 times lower compared to sEMG from healthy subjects. The participant was able to voluntarily modulate the required level of muscle activation during the sub-maximal voluntary isometric contractions. Despite the low sEMG amplitude and a considerable level of muscle co-activation, simulations of an elbow orthosis using the measured sEMG as driving signal indicated that the sEMG signals of the participant had the potential to provide control of elbow movements.
To the best of our knowledge this is the first time that sEMG signals from a man with DMD at the last-stage of the disease were measured, analyzed and reported. These findings offer promising perspectives to the use of sEMG as an intuitive and natural control interface for robotic arm supports in adults with DMD until the last stage of the disease.
机器人手臂支撑旨在通过增强成年杜氏肌营养不良症(DMD)患者的残余功能能力来改善他们的生活质量。机器人手臂支撑的一个关键组成部分是控制界面,因为它负责人机交互。我们之前的研究表明,使用表面肌电图(sEMG)作为控制界面来操作成年DMD患者(22 - 24岁)的机器人手臂支撑是可行的。然而,在生物医学工程领域,人们经常对疾病晚期的成年DMD患者是否具有可测量并用于控制的sEMG信号表示怀疑。
在本研究中,首次对一名37岁患有DMD(布鲁克6级)且在15年前失去手臂功能的男性的肱二头肌和肱三头肌的sEMG信号进行了测量。在最大和次最大自主等长收缩期间测量sEMG信号,并根据信噪比和共同激活率进行评估。除了肌肉严重退化外,我们发现该个体肱二头肌和肱三头肌的sEMG信号均可测量,尽管其最大信号幅度比健康受试者的sEMG低100倍。参与者能够在次最大自主等长收缩期间自愿调节所需的肌肉激活水平。尽管sEMG幅度较低且肌肉共同激活水平较高,但使用测量的sEMG作为驱动信号对肘部矫形器进行模拟表明,参与者的sEMG信号有可能控制肘部运动。
据我们所知,这是首次对疾病晚期的成年DMD患者的sEMG信号进行测量、分析和报告。这些发现为将sEMG用作成年DMD患者直至疾病晚期的机器人手臂支撑的直观自然控制界面提供了有希望的前景。