Department of Biomechanical Engineering, University of Twente, Drienerlolaan 5, 7522 NB Enschede, The Netherlands.
J Neuroeng Rehabil. 2014 Apr 19;11:68. doi: 10.1186/1743-0003-11-68.
The performance capabilities and limitations of control interfaces for the operation of active movement-assistive devices remain unclear. Selecting an optimal interface for an application requires a thorough understanding of the performance of multiple control interfaces.
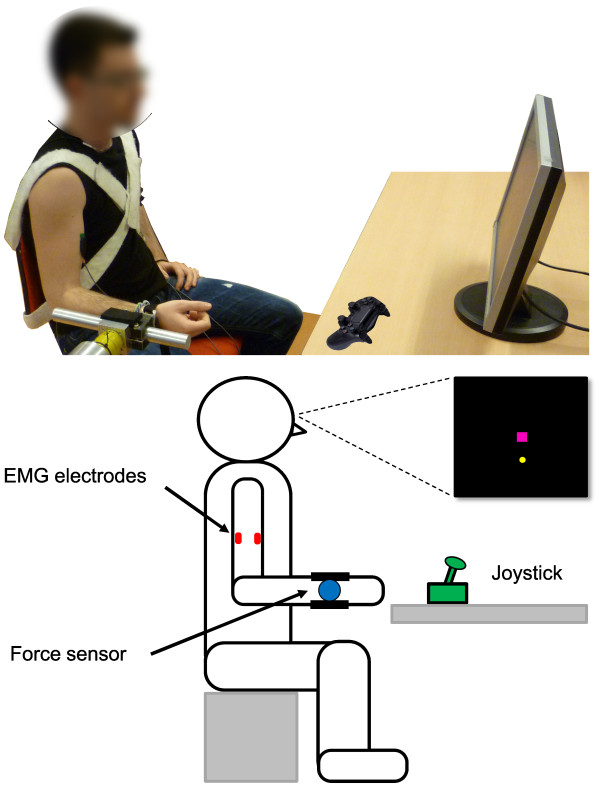
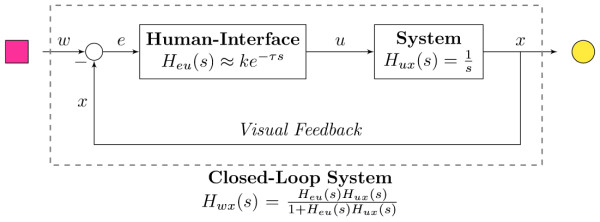
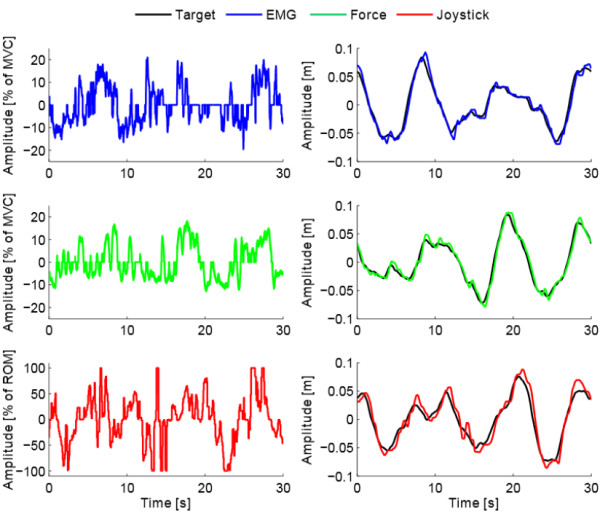
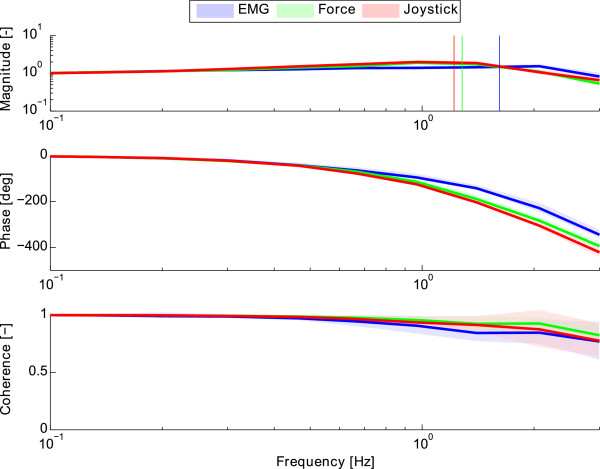
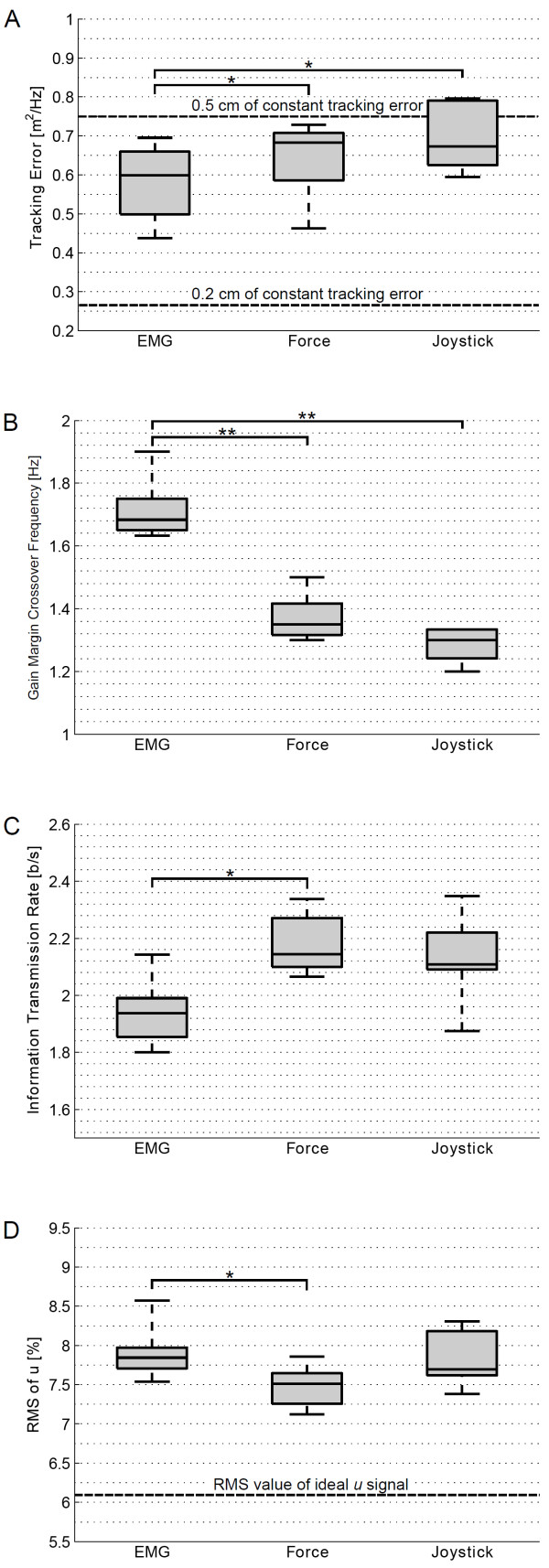
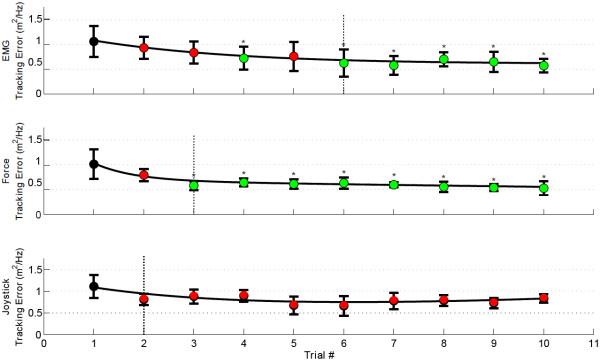
In this study the performance of EMG-, force- and joystick-based control interfaces were assessed in healthy volunteers with a screen-based one-dimensional position-tracking task. The participants had to track a target that was moving according to a multisine signal with a bandwidth of 3 Hz. The velocity of the cursor was proportional to the interface signal. The performance of the control interfaces were evaluated in terms of tracking error, gain margin crossover frequency, information transmission rate and effort.
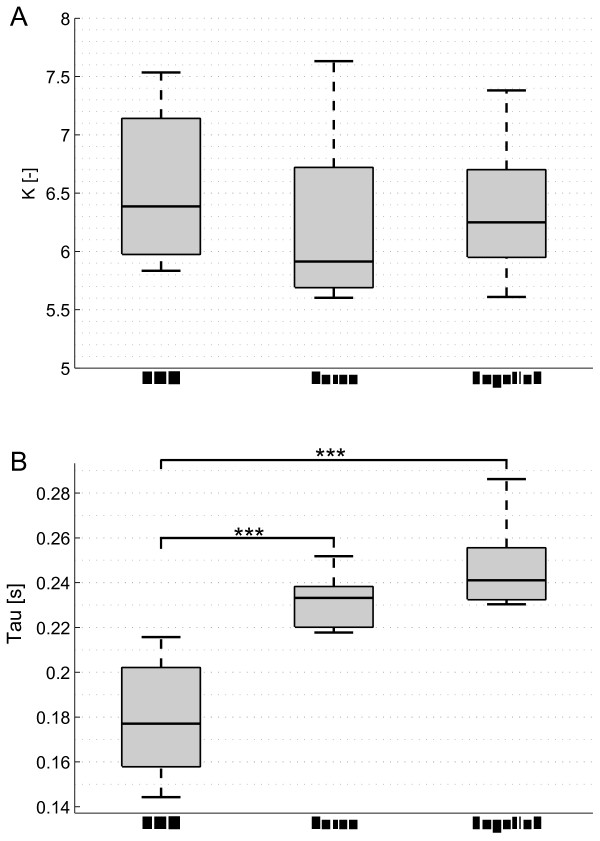
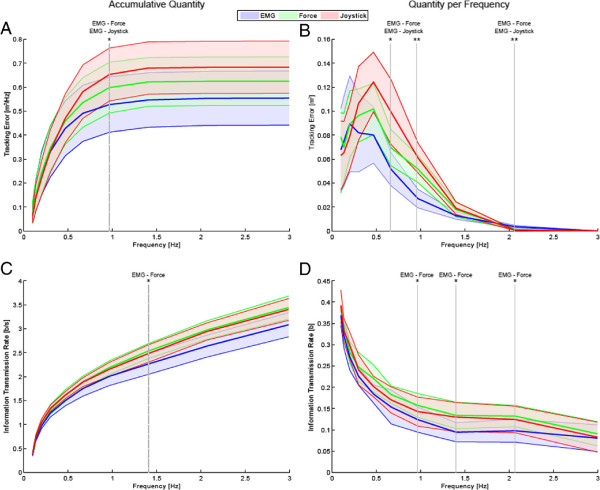
None of the evaluated interfaces was superior in all four performance descriptors. The EMG-based interface was superior in tracking error and gain margin crossover frequency compared to the force- and the joystick-based interfaces. The force-based interface provided higher information transmission rate and lower effort than the EMG-based interface. The joystick-based interface did not present any significant difference with the force-based interface for any of the four performance descriptors. We found that significant differences in terms of tracking error and information transmission rate were present beyond 0.9 and 1.4 Hz respectively.
Despite the fact that the EMG-based interface is far from the natural way of interacting with the environment, while the force-based interface is closer, the EMG-based interface presented very similar and for some descriptors even a better performance than the force-based interface for frequencies below 1.4 Hz. The classical joystick presented a similar performance to the force-based interface and holds the advantage of being a well established interface for the control of many assistive devices. From these findings we concluded that all the control interfaces considered in this study can be regarded as a candidate interface for the control of an active arm support.
主动运动辅助设备的控制接口的性能和局限性尚不清楚。为应用程序选择最佳接口需要彻底了解多种控制接口的性能。
在这项研究中,我们在健康志愿者中评估了基于肌电图、力和操纵杆的控制接口在基于屏幕的一维位置跟踪任务中的性能。参与者必须跟踪根据带宽为 3 Hz 的多正弦信号移动的目标。光标速度与接口信号成正比。控制接口的性能通过跟踪误差、增益裕度交叉频率、信息传输率和努力来评估。
在所评估的四个性能描述符中,没有一个接口具有优势。与基于力和操纵杆的接口相比,基于肌电图的接口在跟踪误差和增益裕度交叉频率方面具有优势。基于力的接口提供了比基于肌电图的接口更高的信息传输率和更低的努力。基于操纵杆的接口在所有四个性能描述符中与基于力的接口没有任何显著差异。我们发现,在跟踪误差和信息传输率方面,超过 0.9 和 1.4 Hz 分别存在显著差异。
尽管基于肌电图的接口远非与环境交互的自然方式,而基于力的接口更接近,但在低于 1.4 Hz 的频率下,基于肌电图的接口表现出非常相似的性能,对于一些描述符甚至比基于力的接口更好。经典的操纵杆具有与基于力的接口相似的性能,并且具有作为许多辅助设备控制的成熟接口的优势。从这些发现中,我们得出结论,本研究中考虑的所有控制接口都可以被视为主动手臂支撑的控制候选接口。