Qian Qiuyang, Hu Xiaoling, Lai Qian, Ng Stephanie C, Zheng Yongping, Poon Waisang
Interdisciplinary Division of Biomedical Engineering, The Hong Kong Polytechnic University, Hong Kong, Hong Kong.
Department of Surgery, Prince of Wales Hospital, The Chinese University of Hong Kong, Hong Kong, Hong Kong.
Front Neurol. 2017 Sep 4;8:447. doi: 10.3389/fneur.2017.00447. eCollection 2017.
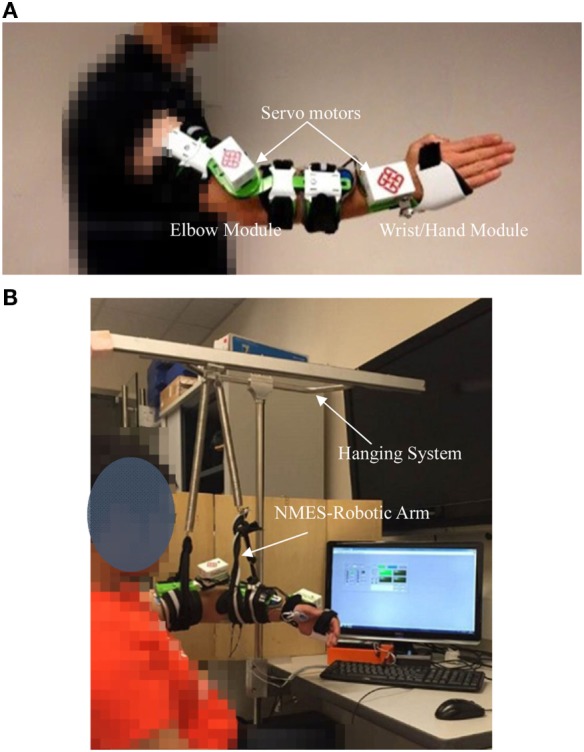
Effective poststroke motor rehabilitation depends on repeated limb practice with voluntary efforts. An electromyography (EMG)-driven neuromuscular electrical stimulation (NMES)-robot arm was designed for the multi-joint physical training on the elbow, the wrist, and the fingers.
To investigate the training effects of the device-assisted approach on subacute stroke patients and to compare the effects with those achieved by the traditional physical treatments.
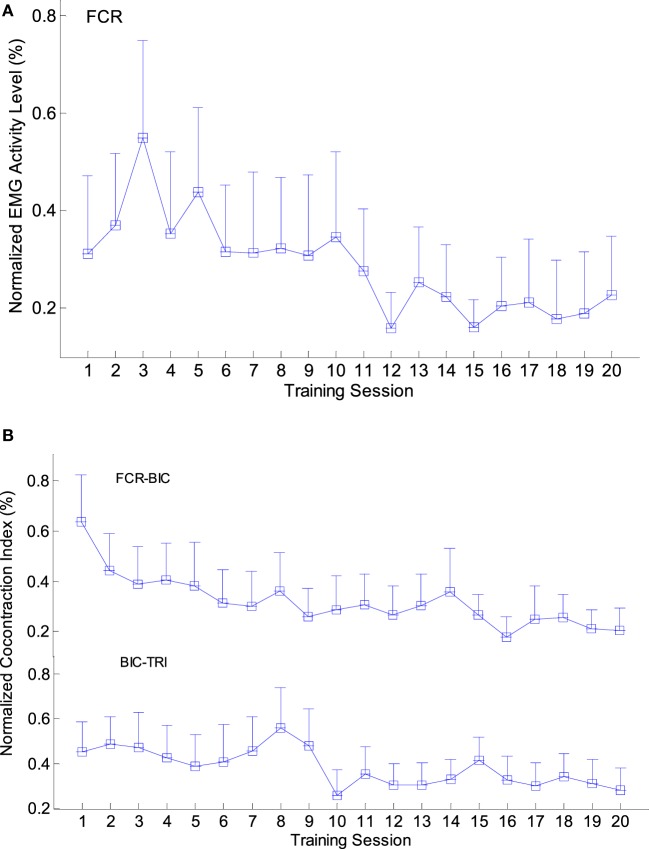
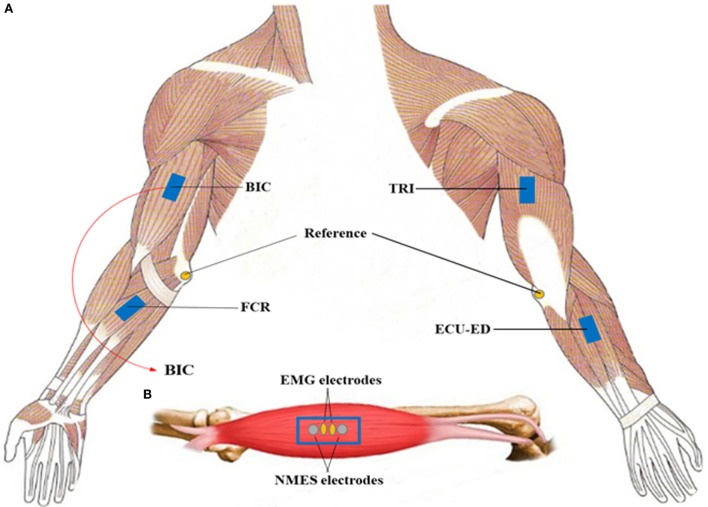
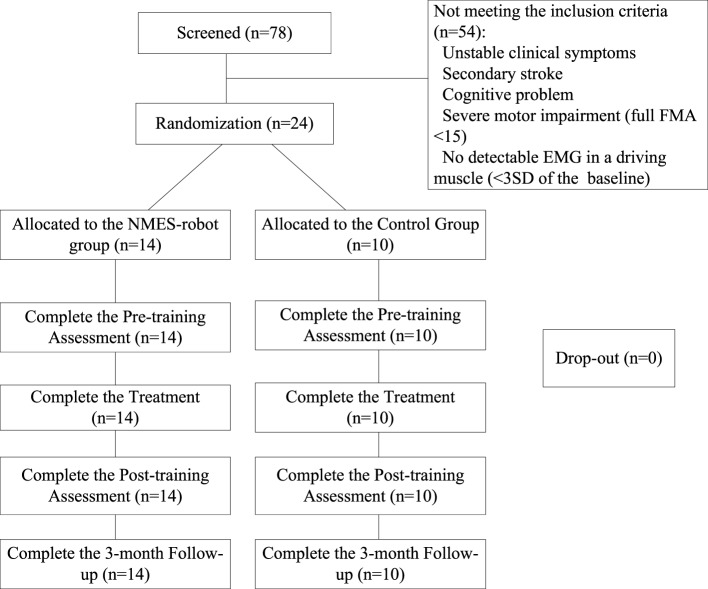
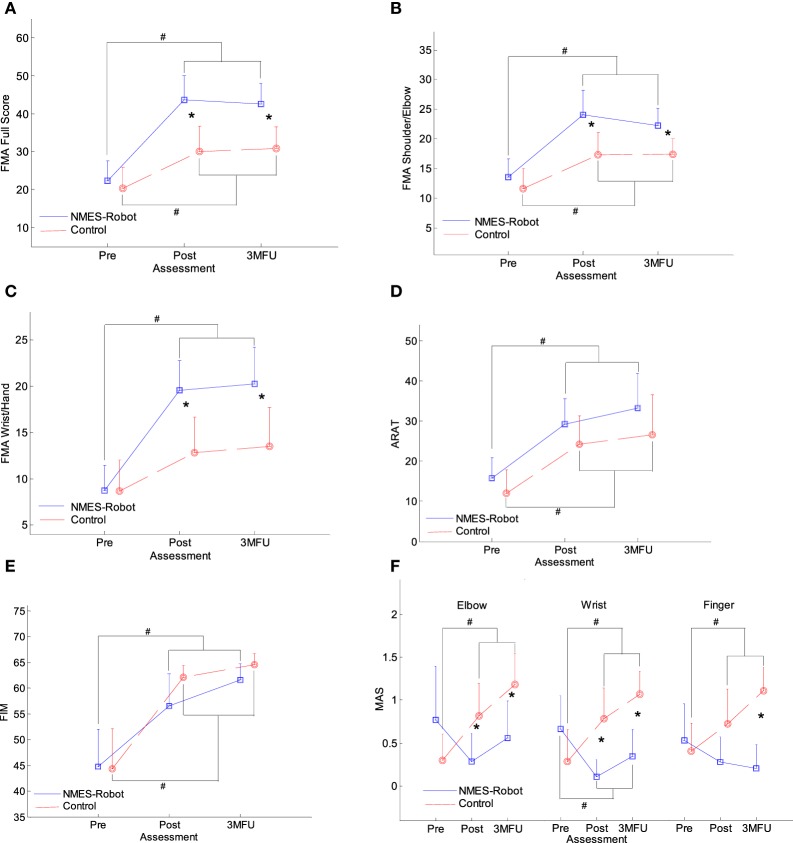
This study was a pilot randomized controlled trial with a 3-month follow-up. Subacute stroke participants were randomly assigned into two groups, and then received 20-session upper limb training with the EMG-driven NMES-robotic arm (NMES-robot group, = 14) or the time-matched traditional therapy (the control, = 10). For the evaluation of the training effects, clinical assessments including Fugl-Meyer Assessment (FMA), Modified Ashworth Score (MAS), Action Research Arm Test (ARAT), and Function Independence Measurement (FIM) were conducted before, after the rehabilitation training, and 3 months later. Session-by-session EMG parameters in the NMES-robot group, including normalized co-contraction Indexes (CI) and EMG activation level of target muscles, were used to monitor the progress in muscular coordination patterns.
Significant improvements were obtained in FMA (full score and shoulder/elbow), ARAT, and FIM [ < 0.001, effect sizes (EFs) > 0.279] for both groups. Significant improvement in FMA wrist/hand was only observed in the NMES-robot group ( < 0.001, EFs = 0.435) after the treatments. Significant reduction in MAS wrist was observed in the NMES-robot group after the training ( < 0.05, EFs = 0.145) and the effects were maintained for 3 months. MAS scores in the control group were elevated following training ( < 0.05, EFs > 0.24), and remained at an elevated level when assessed 3 months later. The EMG parameters indicated a release of muscle co-contraction in the muscle pairs of biceps brachii and flexor carpi radialis and biceps brachii and triceps brachii, as well as a reduction of muscle activation level in the wrist flexor in the NMES-robot group.
The NMES-robot-assisted training was effective for early stroke upper limb rehabilitation and promoted independence in the daily living comparable to the traditional physical therapy. It could achieve higher motor outcomes at the distal joints and more effective release in muscle tones than the traditional therapy.
ClinicalTrials.gov, identifier NCT02117089; date of registration: April 10, 2014.
有效的脑卒中后运动康复依赖于通过自主努力进行的反复肢体练习。设计了一种肌电图(EMG)驱动的神经肌肉电刺激(NMES)机器人手臂,用于肘部、腕部和手指的多关节体能训练。
探讨该设备辅助方法对亚急性脑卒中患者的训练效果,并与传统物理治疗的效果进行比较。
本研究是一项为期3个月随访的前瞻性随机对照试验。亚急性脑卒中参与者被随机分为两组,然后分别接受20节次的上肢训练,其中一组使用EMG驱动的NMES机器人手臂(NMES机器人组,n = 14),另一组接受时间匹配的传统治疗(对照组,n = 10)。为评估训练效果,在康复训练前、训练后及3个月后进行了包括Fugl-Meyer评估(FMA)、改良Ashworth评分(MAS)、动作研究手臂测试(ARAT)和功能独立性测量(FIM)在内的临床评估。NMES机器人组逐节次的EMG参数,包括标准化的共同收缩指数(CI)和目标肌肉的EMG激活水平,用于监测肌肉协调模式的进展。
两组在FMA(总分及肩部/肘部)、ARAT和FIM方面均取得了显著改善(P < 0.001,效应量(EFs)> 0.279)。治疗后仅在NMES机器人组观察到FMA腕部/手部有显著改善(P < 0.001,EFs = 0.435)。训练后NMES机器人组的MAS腕部评分显著降低(P < 0.05,EFs = 0.145),且效果维持了3个月。对照组训练后MAS评分升高(P < 0.05,EFs > 0.24),3个月后评估时仍维持在升高水平。EMG参数表明,NMES机器人组肱二头肌与桡侧腕屈肌以及肱二头肌与肱三头肌的肌肉对中肌肉共同收缩得到缓解,且腕部屈肌的肌肉激活水平降低。
NMES机器人辅助训练对早期脑卒中上肢康复有效,在促进日常生活独立性方面与传统物理治疗相当。与传统治疗相比,它能在远端关节实现更高的运动效果,并更有效地缓解肌张力。
ClinicalTrials.gov,标识符NCT02117089;注册日期:2014年4月10日。