Rong Wei, Li Waiming, Pang Mankit, Hu Junyan, Wei Xijun, Yang Bibo, Wai Honwah, Zheng Xiaoxiang, Hu Xiaoling
Interdisciplinary Division of Biomedical Engineering, The Hong Kong Polytechnic University, Hung Hom, Hong Kong.
Industry Centre, The Hong Kong Polytechnic University, Hung Hom, Hong Kong.
J Neuroeng Rehabil. 2017 Apr 26;14(1):34. doi: 10.1186/s12984-017-0245-y.
It is a challenge to reduce the muscular discoordination in the paretic upper limb after stroke in the traditional rehabilitation programs.
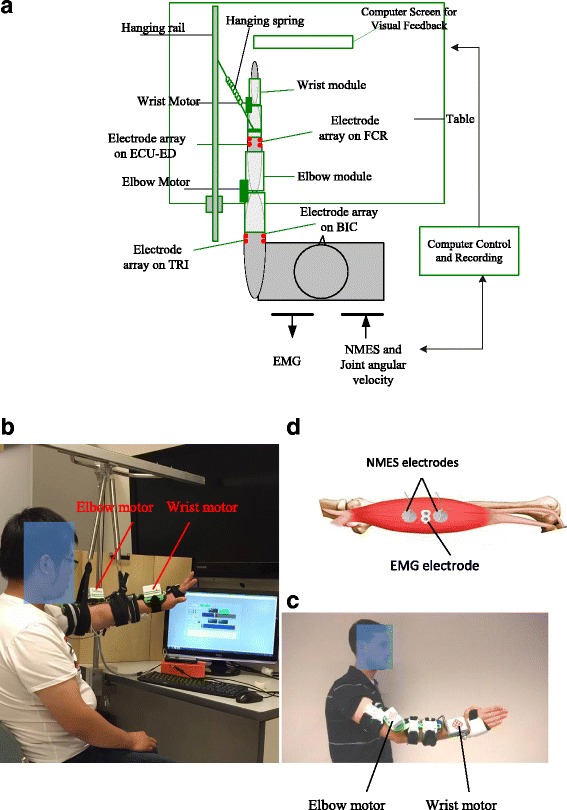
In this study, a neuromuscular electrical stimulation (NMES) and robot hybrid system was developed for multi-joint coordinated upper limb physical training. The system could assist the elbow, wrist and fingers to conduct arm reaching out, hand opening/grasping and arm withdrawing by tracking an indicative moving cursor on the screen of a computer, with the support from the joint motors and electrical stimulations on target muscles, under the voluntary intention control by electromyography (EMG). Subjects with chronic stroke (n = 11) were recruited for the investigation on the assistive capability of the NMES-robot and the evaluation of the rehabilitation effectiveness through a 20-session device assisted upper limb training.
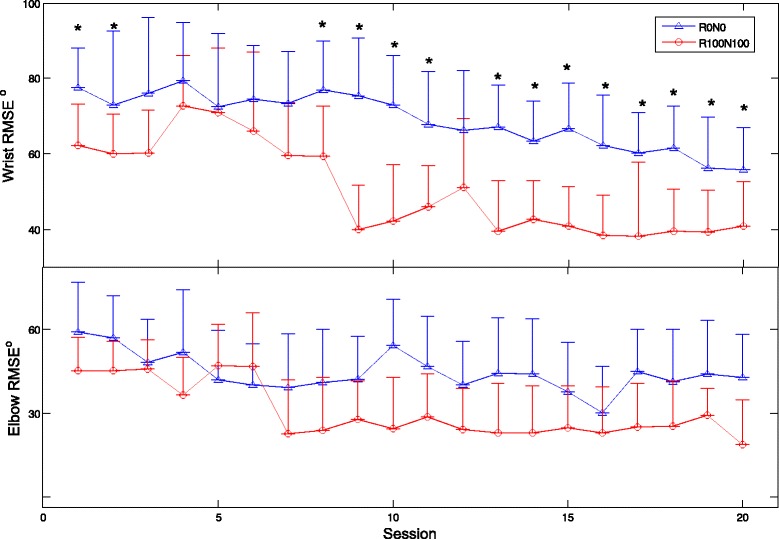
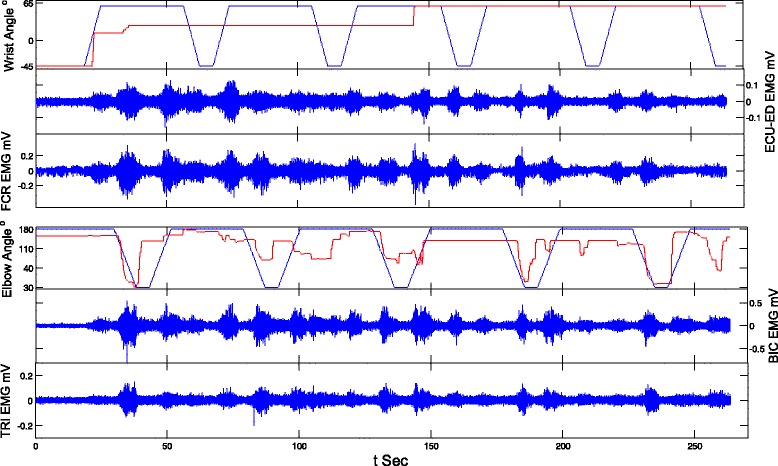
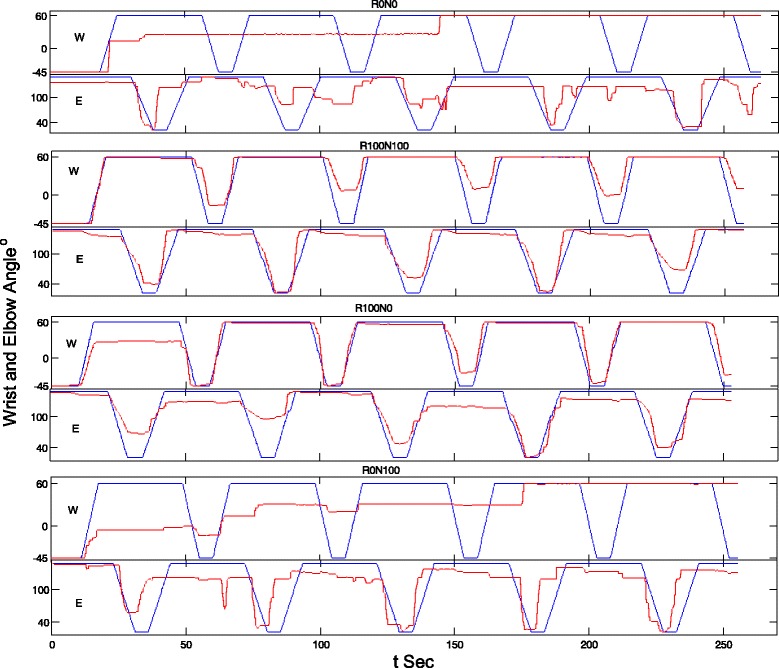
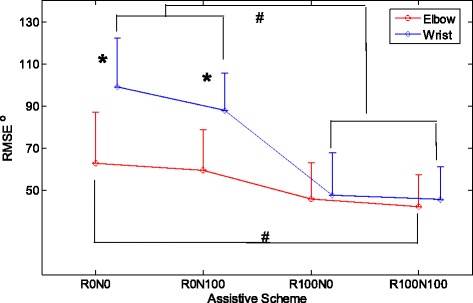
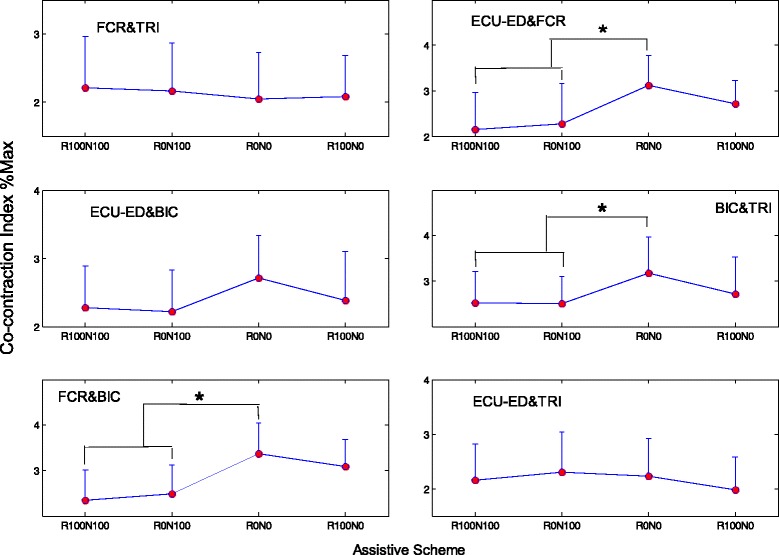
In the evaluation, the movement accuracy measured by the root mean squared error (RMSE) during the tracking was significantly improved with the support from both the robot and NMES, in comparison with those without the assistance from the system (P < 0.05). The intra-joint and inter-joint muscular co-contractions measured by EMG were significantly released when the NMES was applied to the agonist muscles in the different phases of the limb motion (P < 0.05). After the physical training, significant improvements (P < 0.05) were captured by the clinical scores, i.e., Modified Ashworth Score (MAS, the elbow and the wrist), Fugl-Meyer Assessment (FMA), Action Research Arm Test (ARAT), and Wolf Motor Function Test (WMFT).
The EMG-driven NMES-robotic system could improve the muscular coordination at the elbow, wrist and fingers.
ClinicalTrials.gov. NCT02117089 ; date of registration: April 10, 2014.
在传统康复方案中,减少中风后偏瘫上肢的肌肉不协调是一项挑战。
在本研究中,开发了一种神经肌肉电刺激(NMES)与机器人混合系统,用于多关节协调上肢物理训练。该系统可在肌电图(EMG)的自主意图控制下,通过跟踪计算机屏幕上的指示移动光标,在关节电机和目标肌肉电刺激的支持下,辅助肘部、腕部和手指进行手臂伸展、手部张开/抓握以及手臂收回动作。招募了11名慢性中风患者,通过20节次的设备辅助上肢训练,对NMES-机器人的辅助能力及康复效果进行调查。
在评估中,与无系统辅助时相比,在机器人和NMES的支持下,跟踪过程中通过均方根误差(RMSE)测量的运动准确性显著提高(P<0.05)。当在肢体运动的不同阶段将NMES应用于主动肌时,通过EMG测量的关节内和关节间肌肉共同收缩显著减轻(P<0.05)。体育训练后,临床评分即改良Ashworth评分(MAS,肘部和腕部)、Fugl-Meyer评估(FMA)、动作研究手臂测试(ARAT)和Wolf运动功能测试(WMFT)均有显著改善(P<0.05)。
EMG驱动的NMES-机器人系统可改善肘部、腕部和手指的肌肉协调性。
ClinicalTrials.gov。NCT02117089;注册日期:2014年4月10日。