Research Biomechanics, CR&S, Otto Bock HealthCare GmbH, Göttingen, Germany.
J Neuroeng Rehabil. 2017 Nov 16;14(1):117. doi: 10.1186/s12984-017-0322-2.
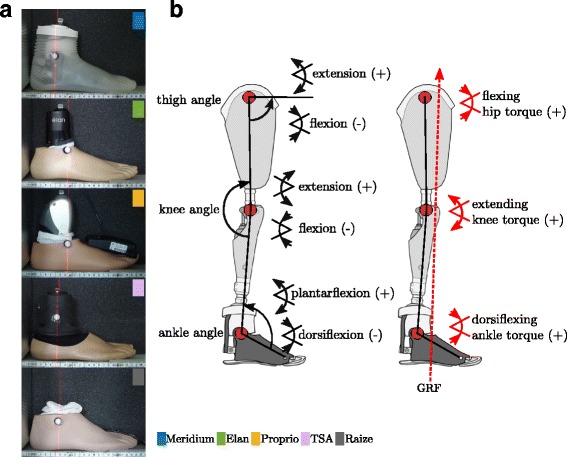
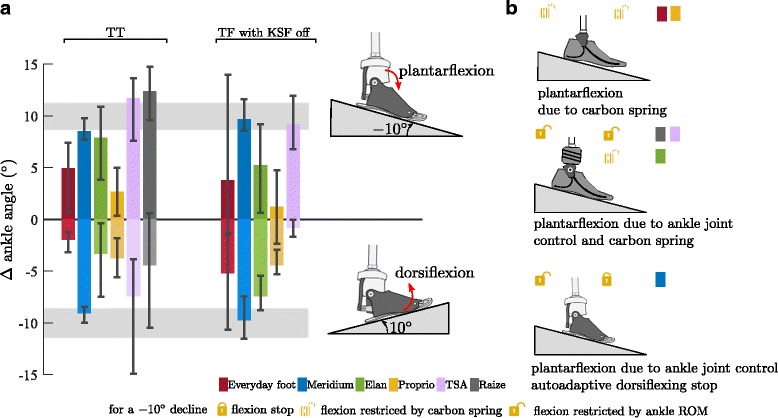
Conventional prosthetic feet like energy storage and return feet provide only a limited range of ankle motion compared to human ones. In order to overcome the poor rotational adaptability, prosthetic manufacturers developed different prosthetic feet with an additional rotational joint and implemented active control in different states. It was the aim of the study to investigate to what extent these commercially available microprocessor-controlled prosthetic feet support a natural posture while standing on inclines and which concept is most beneficial for lower limb amputees.
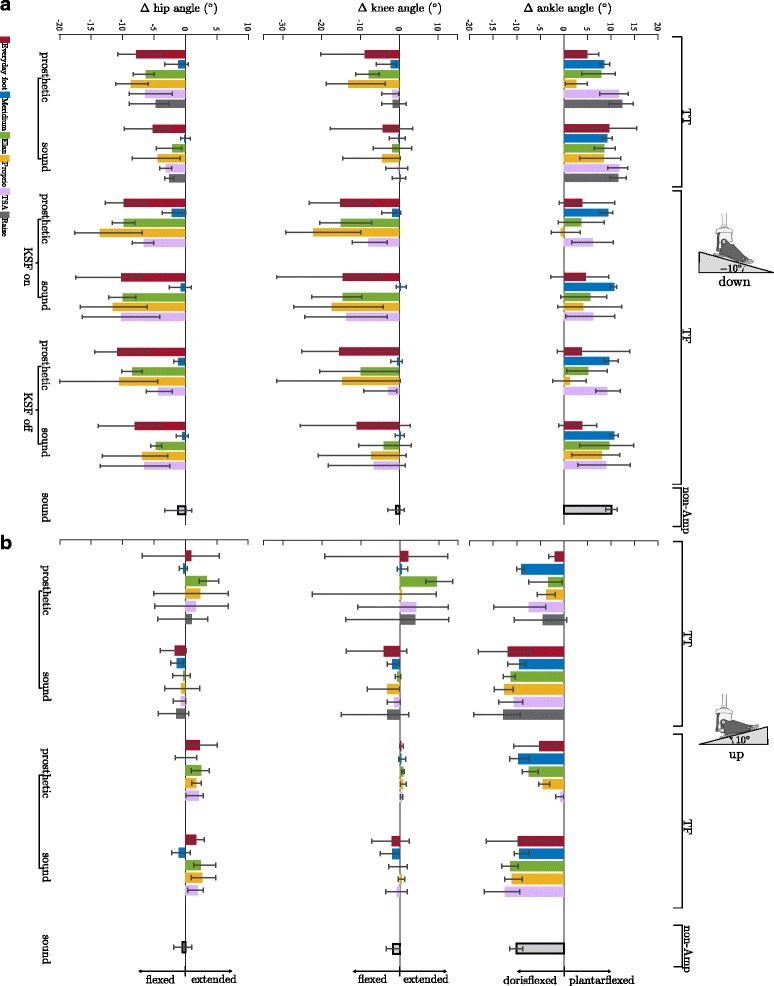
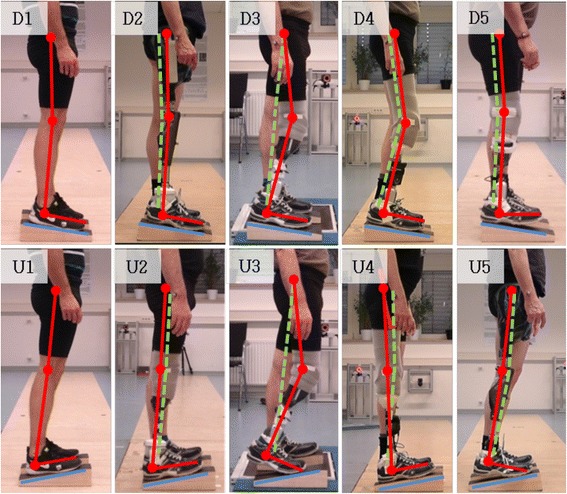
Four unilateral transtibial and four unilateral transfemoral amputees participated in the study. Each of the subjects wore five different microprocessor-controlled prosthetic feet in addition to their everyday feet. The subjects were asked to stand on slopes of different inclinations (level ground, upward slope of 10°, and downward slope of -10°). Vertical ground reaction forces, joint torques and joint angles in the sagittal plane were measured for both legs separately for the different situations and compared to a non-amputee reference group.
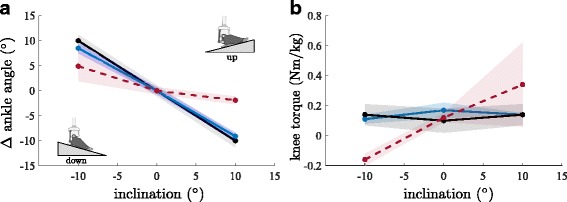
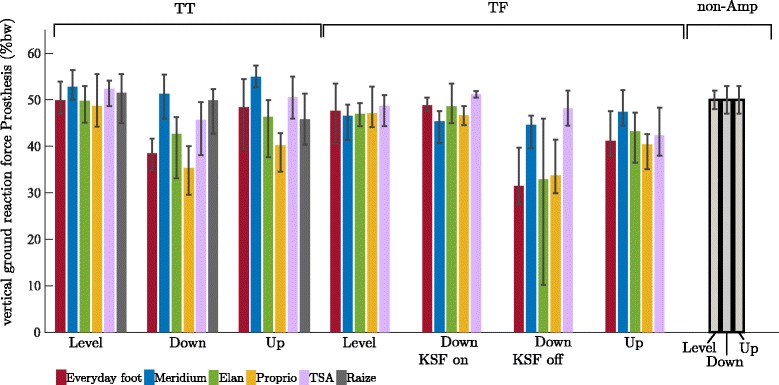
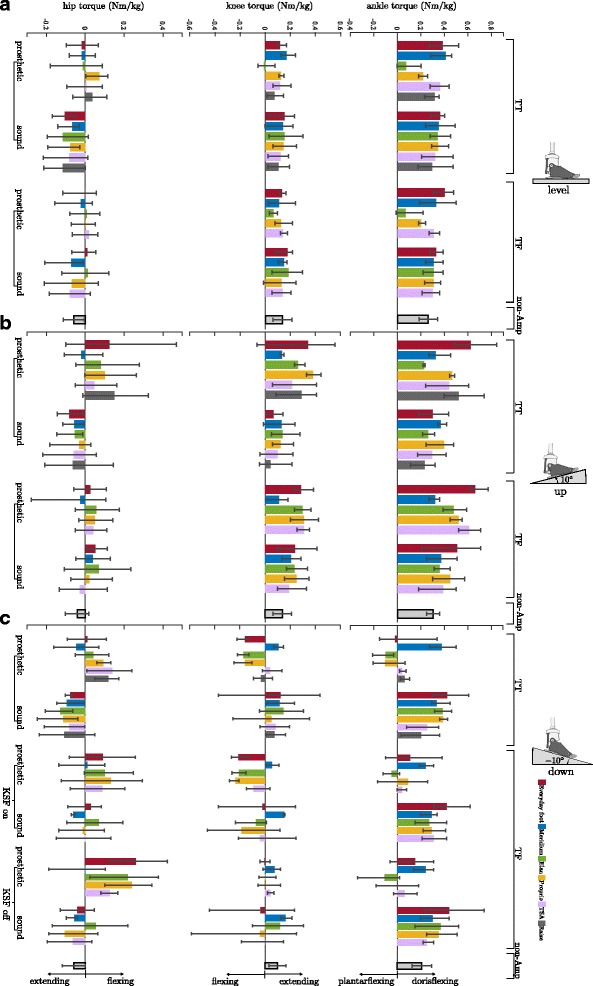
Differences in the biomechanical parameters were observed between the different prosthetic feet and compared to the reference group for the investigated situations. They were most prominent while standing on a downward slope. For example, on the prosthetic side, the vertical ground reaction force is reduced by about 20%, and the torque about the knee acts to flex the joint for feet that are not capable of a full adaptation to the downward slope. In contrast, fully adaptable feet with an auto-adaptive dorsiflexion stop show no changes in vertical ground reaction forces and knee extending torques.
A prosthetic foot that provides both, an auto-adaptive dorsiflexion stop and a sufficient range of motion for fully adapting to inclinations appears to be the key element in the prosthetic fitting for standing on inclinations in lower limb amputees. In such situations, this prosthetic concept appears superior to both, conventional feet with passive structures as well as feet that solely provide a sufficient range of motion. The results also indicate that both, transfemoral and transtibial amputees benefit from such a foot.
与人类相比,传统的假肢脚(如储能和回弹脚)只能提供有限的踝关节运动范围。为了克服较差的旋转适应性,假肢制造商开发了具有附加旋转关节的不同假肢脚,并在不同状态下实施主动控制。本研究旨在探讨这些市售的微处理器控制假肢脚在站在斜坡上时在多大程度上支持自然姿势,以及哪种概念对下肢截肢者最有益。
四名单侧胫骨截肢者和四名单侧股骨截肢者参加了这项研究。每位受试者除了日常使用的脚外,还穿着五种不同的微处理器控制假肢脚。要求受试者站在不同倾斜度的斜坡上(平地、向上 10°的斜坡和向下-10°的斜坡)。分别测量双腿在不同情况下的垂直地面反作用力、关节扭矩和矢状面关节角度,并与非截肢参考组进行比较。
在不同的假肢脚之间观察到生物力学参数的差异,并与参考组进行了比较。在站立时,差异最为明显。例如,在假肢侧,垂直地面反作用力减少了约 20%,而膝关节的扭矩作用是使关节弯曲,对于不能完全适应下坡的脚。相比之下,具有自动自适应背屈停止功能的完全适应性脚在垂直地面反作用力和膝关节伸展扭矩方面没有变化。
为适应斜坡而提供自动自适应背屈停止功能和足够运动范围的假肢脚似乎是下肢截肢者在斜坡上站立的假肢适配的关键要素。在这种情况下,这种假肢概念似乎优于具有被动结构的传统脚以及仅提供足够运动范围的脚。结果还表明,无论是股骨截肢者还是胫骨截肢者,都受益于这种脚。