Toro-Ossaba Alejandro, Tejada Juan C, Sanin-Villa Daniel
Artificial Intelligence and Robotics Research Group (IAR), Universidad EIA, Envigado 055428, Colombia.
Department of Engineering Studies for Innovation, Universidad Iberoamericana Ciudad de México, Prolongación Paseo de la Reforma 880, Colonia Lomas de Santa Fé, Ciudad de México 01219, Mexico.
Biomimetics (Basel). 2025 Apr 1;10(4):214. doi: 10.3390/biomimetics10040214.
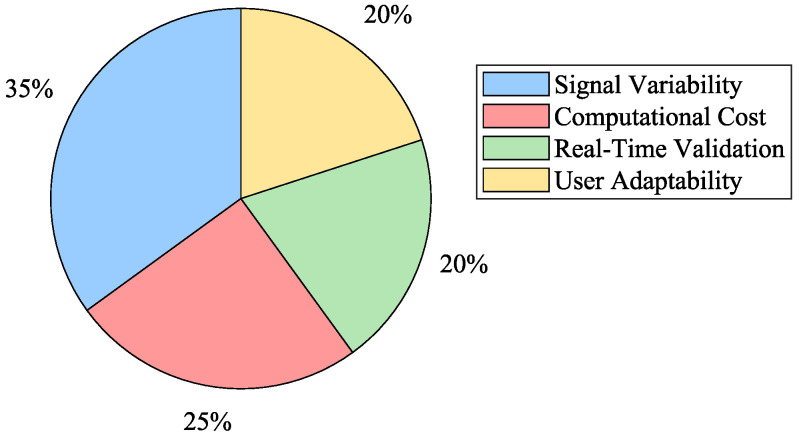
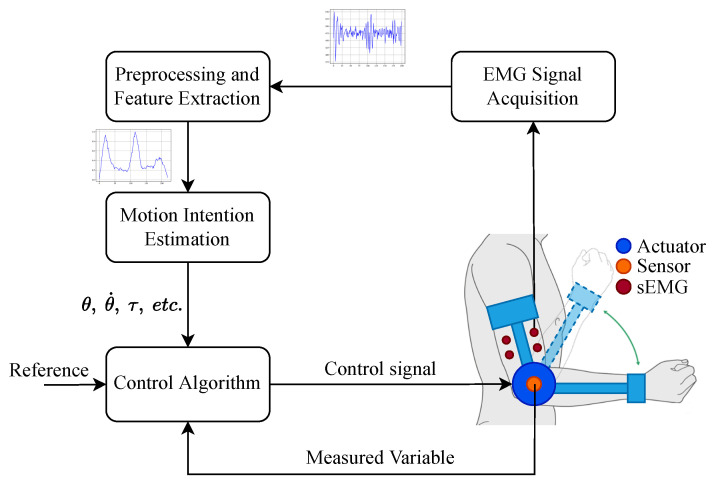
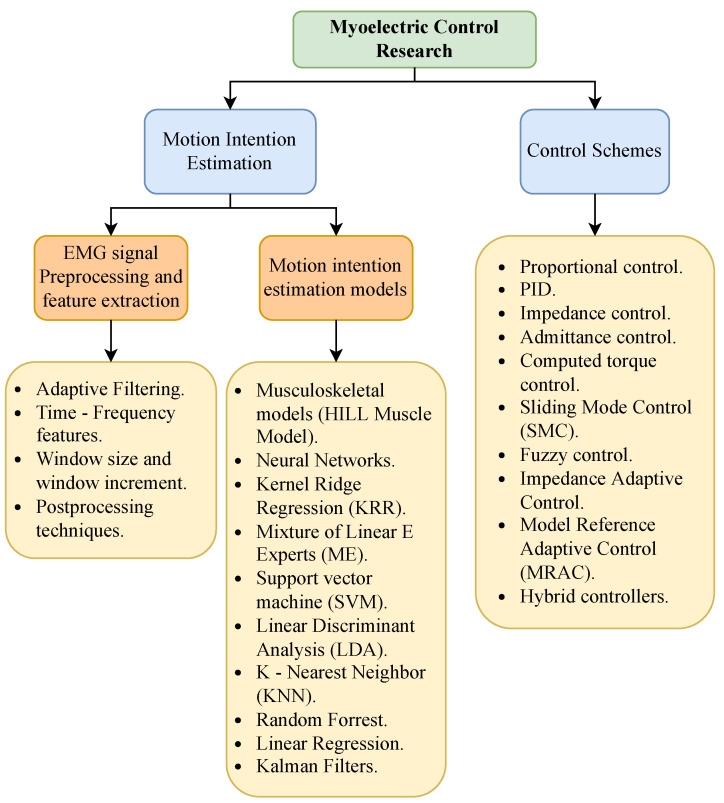
Soft robotic exoskeletons have emerged as a transformative solution for rehabilitation and assistance, offering greater adaptability and comfort than rigid designs. Myoelectric control, based on electromyography (EMG) signals, plays a key role in enabling intuitive and adaptive interaction between the user and the exoskeleton. This review analyzes recent advancements in myoelectric control strategies, emphasizing their integration into soft robotic exoskeletons. Unlike previous studies, this work highlights the unique challenges posed by the deformability and compliance of soft structures, requiring novel approaches to motion intention estimation and control. Key contributions include critically evaluating machine learning-based motion prediction, model-free adaptive control methods, and real-time validation strategies to enhance rehabilitation outcomes. Additionally, we identify persistent challenges such as EMG signal variability, computational complexity, and the real-time adaptability of control algorithms, which limit clinical implementation. By interpreting recent trends, this review highlights the need for improved EMG acquisition techniques, robust adaptive control frameworks, and enhanced real-time learning to optimize human-exoskeleton interaction. Beyond summarizing the state of the art, this work provides an in-depth discussion of how myoelectric control can advance rehabilitation by ensuring more responsive and personalized exoskeleton assistance. Future research should focus on refining control schemes tailored to soft robotic architectures, ensuring seamless integration into rehabilitation protocols. This review is a foundation for developing intelligent soft exoskeletons that effectively support motor recovery and assistive applications.
软机器人外骨骼已成为康复和辅助领域的变革性解决方案,比刚性设计具有更高的适应性和舒适性。基于肌电图(EMG)信号的肌电控制在实现用户与外骨骼之间直观且自适应的交互中起着关键作用。本综述分析了肌电控制策略的最新进展,强调了它们在外骨骼机器人中的集成。与以往的研究不同,这项工作突出了软结构的可变形性和顺应性所带来的独特挑战,这需要采用新颖的方法来进行运动意图估计和控制。主要贡献包括严格评估基于机器学习的运动预测、无模型自适应控制方法以及增强康复效果的实时验证策略。此外,我们还确定了诸如肌电信号变异性、计算复杂性以及控制算法的实时适应性等持续存在的挑战,这些挑战限制了临床应用。通过解读近期趋势,本综述强调了改进肌电采集技术、强大的自适应控制框架以及增强实时学习以优化人机外骨骼交互的必要性。除了总结当前的技术水平,这项工作还深入讨论了肌电控制如何通过确保更灵敏和个性化的外骨骼辅助来推进康复进程。未来的研究应专注于完善针对软机器人架构量身定制的控制方案,确保无缝集成到康复方案中。本综述为开发有效支持运动恢复和辅助应用的智能软外骨骼奠定了基础。